激光雷达行业深度报告:技术路线逐渐清晰、国产激光雷达占得先机
(报告出品方/作者:兴业证券,余小丽)1、多重利好刺激下的激光雷达行业前景光明1.1、投资激光雷达的本质是投资多传感器融合的自动驾驶
(报告出品方/作者:兴业证券,余小丽)
1、多重利好刺激下的激光雷达行业前景光明
1.1、投资激光雷达的本质是投资多传感器融合的自动驾驶方案
激光雷达主要用于探测周边物体的距离和速度。在激光雷达的发射 端,由激光半导体产生一种高能量的激光束,激光与周围的目标发生 碰撞后,再被反射回来,由激光雷达接收端捕获并进行运算,得到目 标的距离和速度,最终形成周围环境的点云数据。车企可以将点云数 据直接用于环境建模从而解决自动驾驶的感知问题。
在多传感器融合方案中,激光雷达是保证其安全冗余必不可少的关键 组成部分。支撑激光雷达行业市场规模持续高速增长的核心驱动力在 于:
1)汽车智能化大趋势推动高阶自动驾驶发展,未来完全自动驾驶有望 成为高端标配。在三电部分逐渐标准化的当下,汽车 OEM 需要打出新 的宣传点以实现产品差异化宣传,其中高级别自动驾驶功能的落地已 经成为整车厂研发的重中之重。在自动驾驶领域实现跨越式领先的车 企有望以此抢占更大的市场份额,行业领先格局也很可能因此发生洗 牌。
考虑到从辅助驾驶向完全自动驾驶的转变对于软硬件的要求截然 不同,L3 及以上自动驾驶对于传感器等核心零部件的技术要求及搭载 数量要求远超辅助驾驶所需,因此激光雷达有望在规模效应的驱动下 实现量升价降的上升发展趋势,当下激光雷达性能优异但价格高昂的 问题也将迎刃而解。根据 Yole 的推测,激光雷达 2020 至 2026 年的市场份额有望以每年接近翻倍的速度从 2600 万美元激增至 23 亿美元, CAGR 增速 94%,这背后也映射出当下市场对于汽车智能化的需求及预 期之高。消费者对于汽车安全性及功能性的考量、政策力推新能源车 快速上量以及融合传感器方案被非特斯拉车企的广泛接纳促使整个激 光雷达行业在 2022 年迎来了乘用车市场的前装量产元年。
2)高阶自动驾驶落地需要解决“全场景”安全驾驶问题,激光雷达是 保证高阶自动驾驶安全性的必备冗余。自动驾驶路线之争还在持续, 目前以特斯拉代表的纯视觉路线在探测距离、精度、算法局限性(难 以解决长尾效应)等方面存在先天缺陷,其对于在“未知场景”的判 断差强人意,行业对于纯视觉方案能否最终走通存在争议。安全性成 为高阶自动驾驶功能落地前车企最急需解决的问题,通过在罕见或未 知场景下提供更多有效信息以辅助决策的方式,激光雷达已然成为提 高现有“摄像头+毫米波雷达+超声波雷达”方案安全性的关键。伴随 激光雷达供应成本的不断下探,搭载前置激光雷达的多传感器融合方 案有望成为主流车企的最优自动驾驶解决方案。
3)特斯拉纯视觉方案先发优势明显,其他车企有望借助融合方案实现 弯道超车。成熟的纯视觉方案需要极大的训练数据库及大量专业人员 以开发可靠算法,而特斯拉由于较早步入自动驾驶领域,其海量量产 车型为特斯拉提供庞大的真实用户行驶数据,凭借北美地区优秀的半 导体行业土壤,特斯拉在摄像头融合、图像处理、自动驾驶算法、自 动驾驶硬件设计等领域有着其他车企几乎无法超越的先发优势。如此 现状下,大多数车企为在自动驾驶领域实现弯道超车,均采用多传感 器融合方案,激光雷达的需求应运而生。与此同时,非特斯拉车企在 软硬件融合方面的劣势也可以通过采购外部成熟方案的方式避免。整 车厂一是可以通过采购英伟达自动驾驶平台以实现更高算力水平,二 是可以采用激光雷达整机厂提供的感知配套软件。激光雷达正在成为 高阶自动驾驶的核心零部件。
1.2、重磅政策助力自动驾驶行业发展,上游核心产业直接受益高速发展
目前多数整车厂商已经具备 L1-L2 级别的安全辅助驾驶能力,但随着 自动驾驶行业的快速发展,各厂商在为 L3 及以上级别自动驾驶的落 地做准备。自动驾驶等级中,L1、L2 被划为辅助驾驶,L3、L4、L5 属于自动驾驶。L3 级自动驾驶是实现高级别自动驾驶的一大门槛,从 L2/L2+向 L3 级别自动驾驶突破的主要难点在于责任划分问题,在搭载 L3 及以上的自动驾驶功能的车辆上,驾驶系统将取代驾驶员成为主体 责任人,目前国内 L3 级别自动驾驶汽车的量产仍需等待相关法律法规 的落地。但随着高级别自动驾驶落地的障碍逐渐被消除,L3 及以上自 动驾驶渗透率的快速增长将大幅提升对车规级芯片、激光雷达、摄像头以及软件等软硬件的需求,并进一步刺激相关下游零部件技术的更 新迭代从而实现需求增加而带来的供给端成本下探。
国内相关政策方面,为推动自动驾驶行业的有序发展,工信部于 2021 年发布的《汽车驾驶自动化分级》国家推荐标准为国内自动驾驶的发 展提供了基础标准依据,为自动驾驶的商用化提供了良好的发展环 境。《汽车驾驶自动化分级》规范了驾驶自动化的定义、驾驶自动化 分级原则、驾驶自动化等级划分要素、驾驶自动化各等级定义、驾驶 自动化等级划分流程及判定方法、驾驶自动化各等级技术要求等,与 此前绝大多数汽车企业普遍采用的 SAE(美国汽车工程师协会)分级 制度相比,本次出台的国标分级制度对于 0-2 等级驾驶自动化系统的 界限区分更加显著,为后续自动驾驶相关法律、法规、强制性标准的 出台提供支撑,且也会对于车企的营销宣传、技术路线选择等方面起 到引导作用。
除国家级政策外,以北上广深为主的多个城市政府正在积极探索自动 驾驶汽车的合法、合规性,并皆已推出多个建设性的自动驾驶相关政 策,加速推动无人驾驶汽车市场的法治化进程。其中,2022 年 6 月 23 日深圳市第七届人民代表大会常务委员会第十次会议通过了《深圳经 济特区智能网联汽车管理条例》(以下简称《条例》),成为我国首 部规范智能网联汽车管理的法规。《条例》的出台或将推动深圳成为 国内首个为 L3 级乃至更高级别自动驾驶放行的城市,同时也为全国其 他地方的 L3 级自动驾驶准入政策提供了标准和模板。此外,对于自动 驾驶中的新基建相关的应用场景,多地政府与企业也在不断加深合作 以期在发展单车智能的同时推动车路协同领域的高速发展。

1.3、大型资本持续注资刺激发展,中上游产业链资金充裕保障技术快速迭代
行业协作方式的变化促使整车厂向上游衍生。L2 及以下 ADAS 供应链 中车企与供应商是严格的层级式供应关系,即软件供应商向车企直接 提供一站式 ADAS 解决方案。但在 L2 及以上的高阶自动驾驶产业链 中,车厂、芯片、软件功能是三方合作关系。高阶自动驾驶需要在拥 有 ADAS 保障的高安全性前提下围绕主动决策进行规划,两者感知、 决策的数据架构完全不同,因此软硬件能力的复用度很低,因此一套 成熟自动驾驶解决方案的落地需要汽车 OEM 与软硬件供应商进行深度 合作,这也将刺激资本持续关注激光雷达相关的整条产业链。
近年来大量资本在不断布局投资激光雷达厂商的同时也分外青睐上游 核心零部件厂商。激光雷达行业产业链上游市场主要为激光器、探测 器、芯片等零组件的零部件厂商,当下市场中不仅公、私募基金及财富 管理公司等正在对激光雷达产业上游企业进行投资,例如 Luminar 及 Ouster 等激光雷达厂家也不断推进对上游企业的收并购。
随着各大车厂基于全新一代电子电气架构推出的车型平台,国内专业 投资机构及半导体 CVC 正在快速布局以汽车电气化和智能网联化为 主题的上游汽车半导体赛道,具体被投资企业包括功能软件、域控制 器、自动驾驶芯片、激光雷达核心感光、发光、光电转换器件、高精 地图等上游核心软硬件制造商。当前国内半导体投资市场的三大巨头 分别为哈勃投资(华为)、小米产业投资及中芯聚源(中芯国际), 三家 CVC 共同向 CMOS 图像传感器芯片设计公司思特威注资,激光雷达产业链中 VCSEL 芯片厂商纵慧芯光与 MEMS 芯片厂商深迪半导 体分别收到其中两家注资。此外歌尔股份、比亚迪、上汽投资等公司 也纷纷注资激光雷达产业链相关的初创公司。目前国内激光雷达整机厂也受到了资本的关注,以禾赛科技、速腾聚 创、镭神智能、一径科技为首的国内激光雷达初创企业目前皆已获得 多轮融资。
1.4、伴随新车型量产,2022年下半年激光雷达出货量有望跃升
自 2021 年 10 月搭载 Livox 激光雷达的小鹏 P5 上市以来,激光雷达进 入正式量产阶段。根据我们测算,2022 年上半年全球搭载激光雷达的 量产车型约有 6 款,共贡献激光雷达出货量约 5.5 万台。2022 年下半 年开始,全球范围搭载激光雷达的车型将迅速爆发,根据我们的统计 2022 年下半年将会新增 14 款搭载激光雷达的量产车。这将带动激光雷达出货量迅速提升,尤其是第四季度,我们预测第四季度环比出货量 将提高 171%。我们预测 2022 年下半年激光雷达出货量将达到 19.8 万 台,全年出货量 25 万台。
2、激光雷达核心组件分析和技术趋势
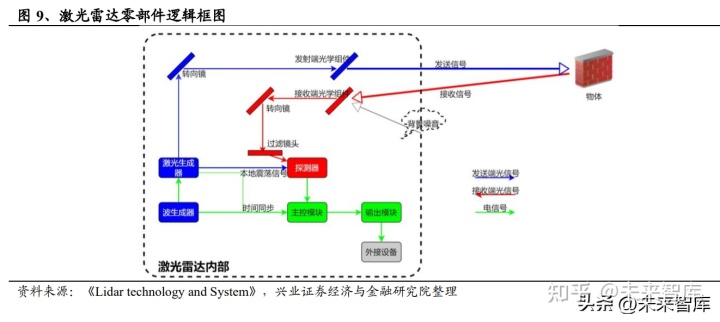
当前激光雷达行业主要公司的产品在多个维度上都存在显著差异,技 术尚未实现收敛。激光雷达主要由发射模块、接收模块、控制及处理 模组和扫描模组(如有)构成,其中发射模组组件主要包括激光驱动 IC、激光器、激光调制器及发射光学系统。 激光发射模块的工作原理为通过采用激励方式周期性地驱动激光器发 射激光脉冲,并利用激光调制器控制激光发射的方向以及线数,最后 通过发射光学系统将激光发射至目标物体上。 接收模块负责接收回波,并将回波反射至探测器;探测器负责将光信 号转换至电信号。 控制及处理模块目前通常为一块 ASIC 芯片及其相关驱动电路,用于 时序控制、波形算法处理并计算生成最终点云数据。
2.1、激光雷达组件(1):发射模组
激光雷达的发射模组中,我们可以根据激光波长、激光器器件结构以 及测距原理三种方式进行分类。 发射模组(1):根据波长分类,我们看好 1550nm 方案成为未来激光雷达行业的发展趋势。 激光发射模组中的激光器为主要成本来源以及重要技术壁垒。根据激 光波长分类,适用于汽车激光雷达系统的激光器主要可以分为 850nm、905nm 以及 1550nm 三种方案,不同波长方案的选择主要需要 从安全性、性能及成本三个维度考量。
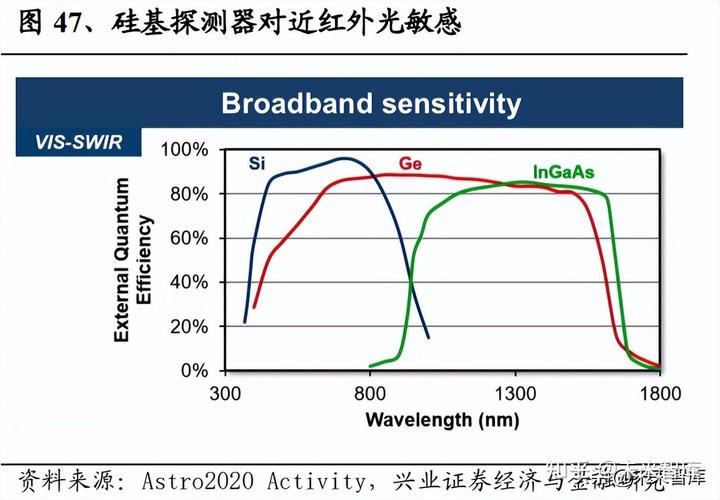
850nm: 850nm 方案为主流技术路径中水汽穿透性最好的方案,因此 最大功率有限,导致产品探测距离较近。受限于安全功率,850nm 方 案的有效探测距离较近,例如 Ouster 的 OS1 产品最远探测距离为 120 米,小于行业平均水平 200 米。但因为波长更短,850nm 激光更难被 空气中的水汽吸收,这有助于提高在潮湿场景下的自动驾驶可靠性。905nm:目前市场主流激光雷达产品的波长多为 905nm,这主要是由于 905nm 方案技术成熟度高而带来的低制造成本优势。作为最常见且生 产成本最低的探测器,硅基探测器对于小于 1000nm 波长的可见光以 及近红外光具备高敏感性,因此激光雷达厂家多选择 905nm 方案。
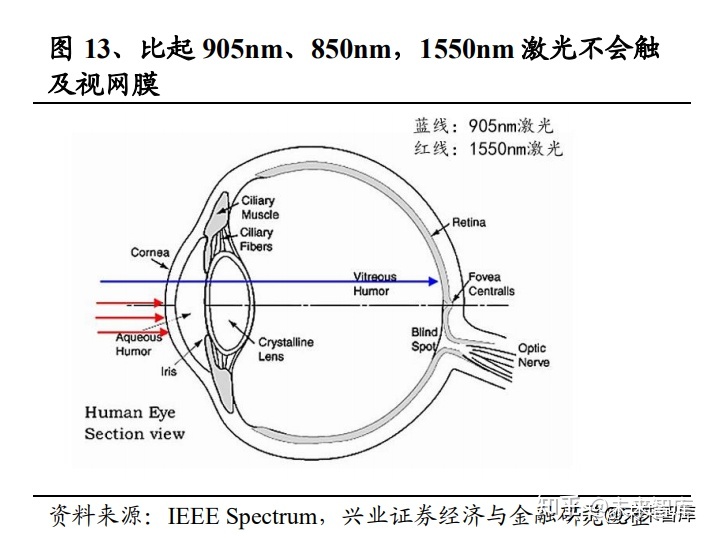
1550nm:1550nm 波长的激光对人眼的安全阈值、有效探测距离及测 距灵敏度更高,但在材料选择方面较为苛刻,我们看好 1550nm 方案 成为未来激光雷达行业的发展趋势。850nm、905nm、940nm 的激光能 直接穿过眼睛的晶状体、角膜和房水达到视网膜,当激光能量被视网 膜吸收时可能造成永久性损伤。超过 1400nm 波长的激光会被角膜和 晶状体强烈吸收,因此对于视网膜的影响更小。此外,SWIR 具备很多 可见光不具备的特性,例如对于烟雾、水蒸气,甚至是硅基材料物体 的穿透性更强,且可以探测很多在可见光环境下肉眼无法区分的颜 色,这也使得采用 1550nm 方案的激光雷达性能更加优异。但 1550nm 激光对材料要求较高,当前商业化阶段只有磷化铟的 EEL 或者光纤激 光器才能释放此波长的激光,而且由于硅基光电探测器在 1000nm 以 上波长工作时的光敏感性极低,因此采用 1550nm 方案的厂家仍需克 服使用铟砷镓(InGaAs)新材料制造的光电探测器的高制造成本以及 低良品率问题。
发射模组(2):根据激光器器件结构分类,我们看好可以组成固态激 光雷达的 VCSEL 方案。根据器件结构,适用于汽车激光雷达系统的激光器有 EEL(边缘发射 激光器)、VCSEL(垂直腔面激光发射器)、光纤激光器(Fiber Laser)及泵浦固态激光器(DPSSL)。其中 EEL 除了可以“直接”用 作激光器外,也可以与光纤或晶体耦合以制造光纤激光器或 DPSSL (泵浦固态激光器)。固态及光纤激光在短波红外波段内拥有更高的 脉冲能量以及更高的人眼安全系数,因此以 Luminar 为首的部分激光 雷达厂家选择的是光纤激光器的方案。得益于半导体材质具备的高电 光转换效率以及低生产成本,目前汽车激光雷达市场中的主流方案仍 为 EEL 以及 VCSEL 方案,VCSEL 相比 EEL 有更广的工作温度、更 好的高温稳定性、更高的寿命、更低的成本,有望成为未来主流路线。
EEL 全称边缘发射激光器(Edge Emitting Laser),是一种激光发射 方向平行于晶圆表面的半导体激光器。适用于不同传输距离和速度, EEL 可以分为 FP 激光器(Fabry Perot Lasers、法布里-珀罗激光器)、 DFB 激光器(Distributed Feedback Lasers、分布式反馈激光器)以及 EML 激光器(Electro-absorption Modulated Lasers、电吸收调制激光 器)。FP 激光器是以 FP 腔为谐振腔,发出多纵模相干光的半导体发 光器件,主要适用于 1310nm/1550nm 波段下的低速率短距离通信,存 在损耗大、传输距离短的问题。DFB 激光器是在 FP 激光器的基础上 采用光栅滤光器件使器件只有一个纵模输出,一般采用 1310nm、 1550nm 两种波长,主要用于高速中长距离传输。EML 通过在 DFB 的 基础上增加电吸收片(EAM)作为外调制器,目前是实现 50G 及以上单通道速率的主要光源。由于技术成熟且具备高发光功率密度, 950nm 的 EEL 方案是当下激光雷达厂商的主流选择。
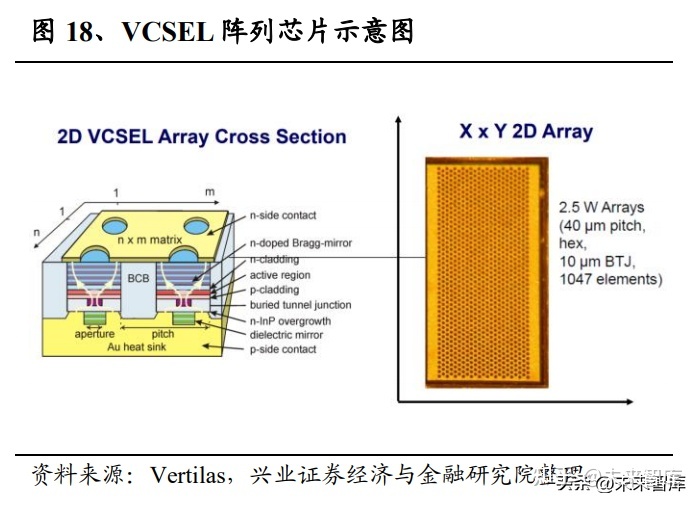
VCSEL 全称垂直腔面激光发射器(Vertical-cavity Surface-emitting Laser),激光束呈圆形对称,是极具发展前景的新型光电器件。 VCSEL 由 MBE(分子束外延)或 MOCVD(金属有机物气相沉淀) 工艺制成,原件结构复杂,磊晶技术要求高。不同于 EEL,VCSEL 的 激光从垂直于衬底的表面发出,具备光电转换效率高、可靠性高、制 造成本低、功耗低等优点。缺点方面,传统的 VCSEL 激光器发光密度 功率低,这也导致搭载传统 VCSEL 发射器的激光雷达只能于测距要求 近的应用领域使用(通常小于 50 米)。
当下 VCSEL 方案的使用场景多为中近距离下的补盲雷达,未来有望 成为强有力的主雷达激光器优胜方案。近年来国内外的多家 VCSEL 厂家已成功研发出具备更高功率密度及斜率效率的多结 VCSEL 激光器, 相比单节 VCSEL,多节 VCSEL 可以提高电光转换效率及功率密度。 同时 Ibeo 及 Ouster 两家公司也已成功开发并量产使用 VCSEL 二维发 光阵列技术的 Flash 方案激光雷达。随着自动驾驶技术的快速发展以及 激光雷达成本的下探,VCSEL 方案的能量密度及发光效率都将逐年提 升,未来 VCSEL 方案将替代 EEL 成为行业主流。
光纤激光器(Fiber Laser)是以掺有激活粒子的光纤为激光介质的激 光器,通常以半导体激光器作为能量泵浦源(以半导体激光器发出的 光,泵浦光纤增益介质产生光),属于固体激光器的一种。但由于光 纤激光器的增益介质形状特殊且具有典型的技术和产业优势,行业中 一般将其与其他固体激光器分开进行研究。使用光纤激光器的激光雷 达具备优异的探测性能,但由于产业链尚未成熟且制造原材料价格昂 贵,在大规模上车前仍需实现大幅降本。具体来看,光纤激光器的优 点包括 1)轻量化及高灵活性:光纤体积小且可以弯曲,因此集成时 可以通过光纤运输光束以实现灵活安装;2)可实现大功率:光纤的几 何形状具有很大的表面积/体积比,散热快,可以在更高功率的情况下 工作,有效探测距离及精度均会提高;3)光束质量高:光纤的波导结 构决定了光纤激光器易于获得单横模输出,且受外界因素影响很小, 因此输出的光束质量理论上接近高斯光束。缺点方面,相较于半导体 激光器仅需要电激励即可实现直接的电光转换,光纤不能够直接实现 电光转换,需要用光来泵浦增益介质,因此光纤激光器的电光转换效 率天然低于半导体激光器。此外,光纤激光器还需要配套使用 InGaAs 探测器,这将提升激光雷达的制造成本。
从激光器的市场供应格局来看,当下全球激光器市场主要被欧美国家 的行业巨头垄断,国产替代有望逐步实现。海外公司较早进入激光器 市场,占据先发优势,行业龙头公司具体包括滨松光子 (Hamamatsu)、Lumentum、II-VI 等。国内方面,随着众多国际大厂 专家回国与本土人才共同掀起创业热潮,VCSEL 元件供应链中的国内 企业数量日益增多,产业链多环节中均存在具备一定实力的本土创业 型公司,同时近几年来国内 VCSEL 相关的发明专利数量也显著增长, 这也帮助了国内激光雷达整机厂的快速发展。国内企业在光学部件 (准直镜、扩散片、分束器等)领域已经实现较高的国产替代率,但 对于激光器芯片这类高壁垒核心零部件而言,国内公司仍与行业巨头存在一定差距。目前国内领先的半导体激光器厂商包括炬光科技、纵 慧芯光、长光华芯、睿熙科技等,光纤激光器厂商包括锐科激光、创 鑫激光、海创光电等。国内公司多年来已经在向以激光雷达发射模组 为首的激光行业中游新业务领域积极扩展,中长期国内激光器企业有 望推出更加先进、可靠、稳定的激光发射模组,最终于多个核心零部 件上实现更高的高国产替代率。
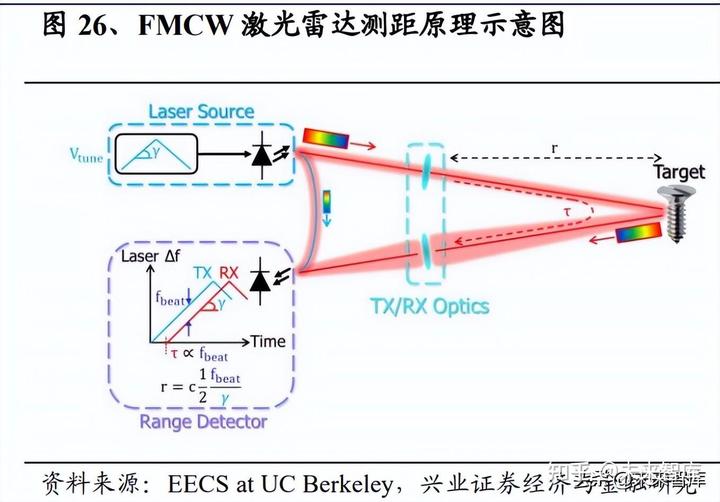
发射模组(3):根据测距原理分类,中短期 ToF 是主流,关注 FMCW。按照测距原理,激光雷达可分为三角测距法、ToF(Time of Flight, 飞 行时间)测距法和 FMCW(Frequency Modulated Continuous Wave, 调 频连续波)测距法三大类,目前能够实现阳光下较远测程(100-250 米)的 ToF 及 FMCW 方案是激光雷达的优选方案。
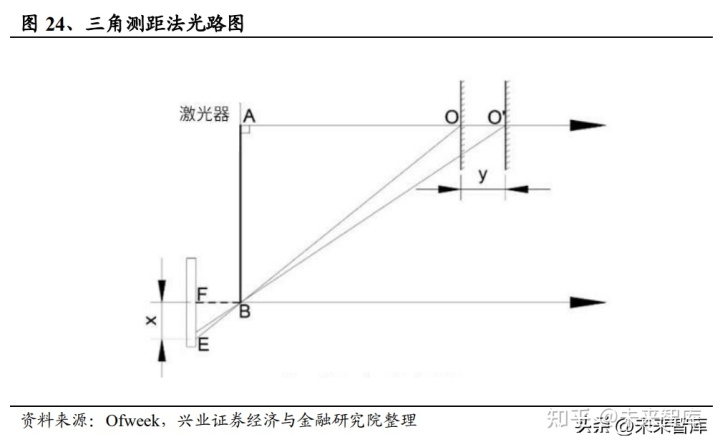
三角测距方案虽成本低,但因其探测精度有限,因此多用于对精度要 求不高的部分商用及民用场景,例如于室内短距离扫描的扫地机器 人。激光三角测距法的基本原理为激光照射到物体后,其反射光由 CCD (Charge-coupled Device,感光耦合组件)接收,依照光学路 径,不同距离的物体将会成像在 CCD 上不同的位置,然后根据三角公 式进行计算就能推导出被测物体的距离。但根据测距分辨率公式,随 着测量距离的增加,三角法测距的分辨率成二次指数形式恶化,因此 三角测距法对远距离测距精度较差,难以被定位中远距离探测的激光 雷达方案所采纳。
ToF(Time of Flight)全称是飞行时间测距法,当下此方案技术成熟 度及测量精度较高,是当下激光雷达整机厂的主流选择。ToF 方案的 基本原理为 ToF 传感器给到光源驱动芯片调制信号,调制信号控制激 光器发出高频调制的近红外光,遇到物体漫反射后,接收端通过发射 光与接收光的相位差或时间差来计算深度信息。ToF 技术根据发射光 的调制方法,分为采用脉冲调制的直接飞行时间测量(dToF)和采用 连续波或脉冲调制的测量相位差的间接飞行时间测量(iToF)。dToF 方 案相比 iToF 方案有较高的成本,但远距离探测场景下的 dToF 方案在 测量精度、功耗及信号处理等方面具备明显优势,因此随着设备硬件 的不断升级, dToF 将逐步取代 iToF 技术。
虽然 ToF 方案的测距原理十分直观,但为保证高精度探测,实际应用 所需的工作条件要求较高。高性能的 ToF 方案测距系统需要具备高脉 冲发射峰值、弱脉冲回波、窄脉冲宽度的特点以降低太阳光子和其他 激光雷达的干扰。早期的 ToF 模块存在体积大及成本高的问题,因此 多用于工业领域。此外,ToF 激光雷达采用的直接探测方式会对所有 进入探测器的光都有所响应,因此 ToF 方案厂家需要投入大量资金研 发抗干扰技术,例如为每束激光脉冲单独编码,但这往往会导致信噪 比下降进而牺牲部分测距能力。近年来集成电路与传感器技术的突破 有力推动了 ToF 模块的小型化发展,具体体现在行业已经于 CMOS 芯 片上实现对光脉冲相位的测量,未来 ToF 方案的性能有望进一步提 升。
FMCW(Frequency Modulated Continuous Wave, 调频连续波)能直 接测量物体速度,但其对激光雷达的硬件要求极高,目前仍属于试水 阶段。与 ToF 路线不同,FMCW 主要通过发送和接收连续激光束,把 回光和本地光做干涉,并利用混频探测技术来测量发送和接收的频率 差异,再通过频率差换算出目标物的距离。优点方面,相较于易受环 境光干扰的 ToF 方案,搭载 FMCW 方案的激光雷达只对自己发出的光 脉冲做出反应,因此 FMCW 方案的抗干扰能力极强。此外,FMCW 方案的信噪比高于 ToF 方案。ToF 方案仍需解决“加性噪声”问题,即 ToF 需要根据反射率来判断探测端接收到的信号是否为“伪目标点”。 反观 FMCW 方案,由于其只对自己发出的光脉冲做出反应,因此可以 过滤掉不匹配的返回的光,理论上拥有更高的信噪比。
然而,FMCW 方案并不能认为是取代 dToF 方案的更优选择。主要原 因在于:1)FMCW 技术成熟度远低于 dToF,研发及制造成本高昂: 相较于上游元器件供应链较为成熟的 dToF 方案,FMCW 方案对于光 学元件的要求极高,且市场上能够提供这类高性能元器件的供应商数 量稀缺;2)FMCW 方案无法一次性测量横向速度。由于 FMCW 方案 利用的多普勒效应检测的是径向速度而不是横向速度且 FMCW 方案的 点频低于 dToF 方案,因此 FMCW 对于横向目标的检测能力弱于 dToF 方案。
当下 ToF 激光雷达已经成功上车,中期 ToF 及 FMCW 激光雷达将共 存,未来 FMCW 方案有望成为优胜方案。ToF 方案的产品性能有望随 着收发模组技术的更新换代稳步提升,降本空间大,因此会成为中短 期市场的主流测距方案。反观 FMCW 方案,虽然理论上在灵敏度等指 标上性能更优,但其核心零部件的生产能否实现产业化仍存在较大的 不确定性。
2.2、激光雷达组件(2):接收模组
收发模组与信息处理模组同为激光雷达的核心器件,核心组件的高昂 成本是制约激光雷达上车的一大关键瓶颈,这也迫使激光雷达厂商不 断进行技术升级以期降低制造成本。根据实际产品拆分,作为首款通 过车规级认证并上车量产车型的激光雷达,Valeo Scala 1 选择将激光 器及光电探测器集成至单个模块内,主板(搭载信息处理模组)与收 发模块共同占据了 78%的大部分制造成本。激光器、光电探测器及芯 片作为激光雷达的三大核心组件直接影响产品的性能、成本及可靠 性。相较之下光学组件属于较为成熟的零部件,因此虽仍有一定降本 空间但对于整体成本的下探影响有限。
具体来看,接收模组中最重要的部分为光电探测器,其主要原理是通 过光电效应将光信号转换为电信号以实现对光信号的探测。激光雷达 探测器主要可以分为 PD(Photodiode,光电二极管)、APD (Avalanche Photo Diode、雪崩式光电二极管)、SPAD(Single Photon Avalanche Diode、单光子雪崩二极管)和 SiPM(Silicon PhotoMultiplier、硅光电倍增管)四类。
光电二极管(Photo-Diode)是由一个 PN 结组成的半导体器件,具有 单向导电性。PN 结由一个 n 型掺杂区和一个 p 型掺杂区紧密接触所构 成,但由于 PN 二极管的扩散运动只发生在 PN 结附近,远离 PN 结的 地方没有电场存在,因此决定了 PN 光电二极管的光电转换效率非常 低下且响应速率慢。 PIN-PD 是由一个 P-I-N 结组成的半导体器件,PIN-PD 是在 p 型 n 型 半导体间增加本征层以达到相较于一般 P-N 结光电二极管更高的灵敏 度。但由于 PIN-PD 对光电流无增益效果,因此目前仅适用于技术尚未 成熟的 FMCW 方案激光雷达。
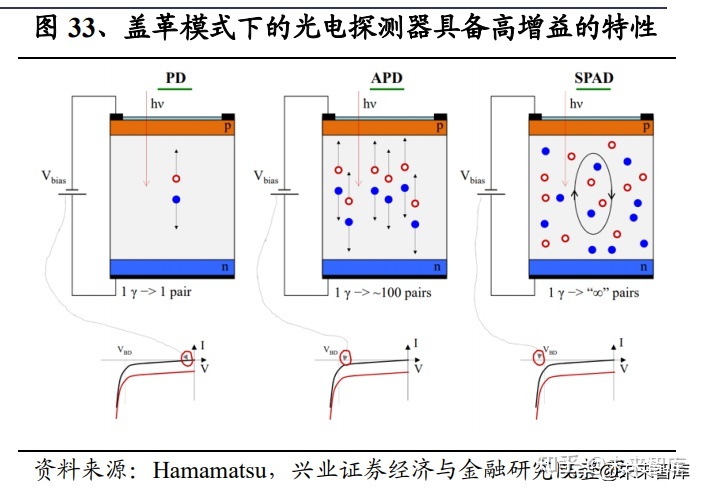
APD 雪崩光电二极管技术较为成熟,其工作原理类似光电倍增管,通 过施加一个较高的反向偏置电压后利用电离碰撞(雪崩击穿)效应使 得光电流成倍地激增。目前激光雷达主要利用 APD 的线性增益区间以 实现比 PN/PIN 光电探测器更远的探测距离,根据 Hamamatsu 的产品 对比,APD 的线性增益效果一般可高达 100 倍。且相较于 PD 及 PINPD,APD 光电探测器拥有量子效率高、响应时间快、暗电流低等特 点,因此是现在激光雷达行业应用最为广泛的单光子探测器。但在高 阶自动驾驶的使用场景下,APD 方案的增益效果仍无法满足远距离探 测所需的精度要求。
为解决 APD 增益效果不足的问题,单光子雪崩二极管(SPAD)是专 门设计在远高于击穿电压的反向偏置电压下工作的一类产品,因此 SPAD 可以认为是工作在击穿电压上的 APD。APD 偏置电压低于雪崩 电压的特性会对入射光电子起到线性放大作用,即 APD 处于反向电压 更大,增益也越大的线性模式。作为对比,SPAD 的工作状态为偏置 电压高于雪崩电压的盖革模式。盖革模式下的单个光子即可使 APD 的 工作状态实现开、关之间的转换, 形成一个陡峭的回波脉冲信号, 因而 具备单光子成像的能力,因此 SPAD 对于极弱光学信号的探测效果更 加优异。此外,SPAD 探测器还与 CMOS 工艺兼容,可以受益于硅基 CMOS 技术的快速发展,SPAD 方案在小型化、低成本及规模化生产 方面具备优势。总体而言,SPAD 具有优异的单光子探测能力以及高 时间分辨率,但其仍存在以下缺陷:1)需要性能优异的淬火电路设计 以提升光子探测能力;2)暗电流较大,3)无法像 APD 一样获取目标 的灰度信息。
SiPM(Silicon Photomultiplier、硅光电倍增管,又称 MPPC)是由多 个带有猝灭电阻的 SPAD 并联组成,由于每个 SPAD 单元是独立的, 因此输出的信号会有幅度的变化,照射到 SiPM 探测器上的光子数越 多,幅度越大。在进行远距离探测时,SiPM 可实现比其它传感器更高 的信噪比,主要优点还包括高增益、低电压操作、高灵敏度等。但采 纳 SiPM 技术方案的激光雷达整机厂仍需解决 SiPM 方案光子探测效率 较低的问题。
考虑到技术成熟度及成本问题,目前激光雷达行业普遍使用 APD 作为 探测器方案,但随着制造工艺的不断改进,激光雷达探测器中长期的 发展趋势将从 APD 转向 SPAD/SiPM,其中 SPAD 阵列(SiPM)未来 有望同时实现小型化、低成本、高信噪比、高采集速度、高时间及空 间分辨率的关键性能参数,预计长期将成为行业最终定型的技术路 线。
2.3、激光雷达组件(3):扫描模组
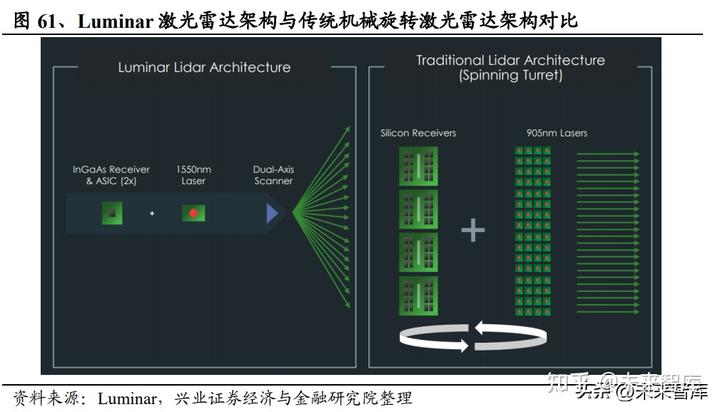
按照扫描方式根据有无机械转动部件激光雷达分为机械式激光雷达、 半固态式激光雷达以及固态式激光雷达。相较于半固态式以及固态式 方案,机械式激光雷达技术推出得最早也最为成熟,因此目前激光雷 达行业中使用机械式方案的产品数最多。根据 Yole 的统计,截至 2021 年 Q3,在所有成功签署合作协议的 29 款产品中,19 款激光雷达产品 使用了机械式方案。但由于机械式方案体积大、价格高,因此不适合 搭载于量产车上,目前更多用于价格敏感度相对较低的测绘领域。中 短期而言,高级辅助驾驶汽车主要采用半固态激光雷达方案,扫描方 式为集成度较高且成本明显下降的转镜式或 MEMS 微镜方案。长期随 着固态激光雷达技术逐渐成熟且成本下行,固态式激光雷达预计将成 为行业最优解决方案。
机械式激光雷达可实现 360°扫描,常用于主流无人驾驶测试项目。机 械式激光雷达的优势在于可以对周围环境进行 360°的水平视场扫描, 而半固态式和固态式激光雷达往往最高只能做到 120°的水平视场扫 描,且在视场范围内测距能力的均匀性差于机械旋转式激光雷达。机 械旋转式激光雷达凭借兼具 360°水平视场角和测距能力远的优势,目 前主流无人驾驶测试项目纷纷采用了机械旋转式激光雷达作为主要的 感知传感器。
由于存在可活动零部件且所需精密零部件数量大,机械式激光雷达难 以满足繁多且苛刻的车规级要求,叠加其高昂的平均售价,目前机械 式激光雷达正在逐渐退出乘用车领域的激光雷达市场,多用于 Robotaxi 其他细分领域。由于机械式激光雷达多由分立器件组装而成 (64 线产品即需 64 个收发通道),其组装、调试及装配工艺复杂,这 也导致其生产周期长,成本长期居高不下。例如激光雷达行业鼻祖 Velodyne 推出的 HDL-64E 产品虽可实现 360°水平视场角扫描且点云质量优秀,但由于每个收发通道的物料成本已超过 100 美元且需要手工 调试,其在 2016 年高达 8 万美元的售价依旧令下游车企望而却步。此 外,由于机械式方案中的激光雷达收发模块会随扫描模组一同进行旋 转,零部件易产生损耗,机械部件寿命不长,因此较难完成车规级标 准的验证。
半固态激光雷达方案的特点是收发单元与扫描部件解耦,按照扫描模 块的运动方式具体可以再细分为棱镜式、转镜式及微振镜(MEMS) 三种方案。截至当下,三种半固态方案都已有成功上车量产车型的案 例。
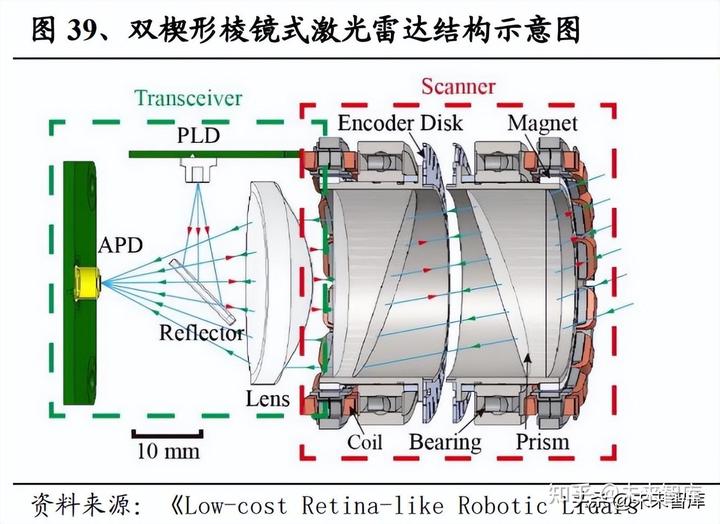
棱镜式激光雷达的代表为大疆 Livox 采用的双楔形棱镜方案,但由于 其技术方案来源于测绘雷达,实际上车乘用车存在水土不服的表现。 双楔形棱镜式方案虽可以使用很少的收发通道实现较高的等效点云密 度(Livox HAP 仅有 6 个收发通道但可以实现等效 144 线),但其需 要牺牲扫描时间以获得更高的点云密度。对于高速行驶的乘用车而 言,感知系统的反应速度与精度同为关键指标,因此 Livox HAP 所采 用的棱镜式方案所提供的 45 万点/秒的点频相较其他竞品上百万的点 频参数存在劣势。作为首批于量产车型上车的激光雷达之一,小鹏与 Livox 的合作仅停留在小鹏 P5 这款车型上,最新的小鹏 G9 车型上搭 载的是采用 MEMS 方案的速腾聚创的 M1 激光雷达。因此我们认为棱 镜式方案在车载激光雷达市场的发展空间有限,未来类似的棱镜式方 案还是会更多地面向测绘、工业、安防这类低速但对扫描精度要求高 的使用场景。
转镜方案为目前实现车规级量产可行性最高的方案之一,目前半固态 转镜方案正在从一维转镜向二维转镜发展。采用转镜方案的激光雷达 电机在带动扫描模块运动时其收发模块保持固定,具体实现方案可细 分为一维转镜方案及二维转镜方案。一维转镜方案只有一面扫描镜, 其通过旋转的多面体反射镜将激光反射到不同的方向以实现探测。一 维转镜方案虽克服了部分由于收发模块旋转对产品性能带来的负面影 响,但由于一维转镜线束需与激光发生器数量一致,一维转镜式激光 雷达在成本控制方面存在一定劣势。二维转镜内部由于集成了一纵一 横两面扫描镜,因此可以实现一束激光包揽横纵双向扫描。二维转镜 方案的具体实现原理为激光在通过第一个楔形棱镜发生第一次偏转后 通过第二个楔形棱镜后发生第二次偏转,通过控制两面棱镜的相对转 速以实现对激光扫描形态的控制。相较于一维扫描方案,二维转镜方 案可以用相同数量的收发通道实现更高的等效线数。但由于二维转镜 扫描系统的集成度较低,因此二维转镜式激光雷达方案仍需进一步改 进其光学系统控制机制及提高转轴精度。
MEMS 技术成熟,并且减少了机械结构部件,在光学素质、功耗等方 面都有优势,因此 MEMS 方案可以认为是当前最适合乘用车市场的激 光雷达方案。MEMS 振镜是一种基于微机电系统(MEMS,MicroElectro-Mechanical System)技术制作而成的微小可驱动反射镜,工作原 理为在保持激光发生器本身固定不动的同时通过控制微小的镜面平动 和扭转往复运动,将激光管反射到不同的角度以完成扫描。采用 MEMS、二维转镜、棱镜等二维扫描方案的激光雷达在收发模块成本 方面具备明显优势,此外还具备体积小、可靠性强、未来降本空间大 等优点。MEMS 方案由于取消了马达、多棱镜等较为笨重的机械运动设备,激光雷达内部的毫米级微振镜在提高整体鲁棒性的同时进一步 减少了激光雷达的尺寸,更高的集成度也意味着其更易于实现上车。 成本方面,激光器数量的减少意味着发射模块整体成本的降低,同时 由于 MEMS 振镜整体结构使用的硅基材料已在投影显示领域商用化应 用多年,上游产业链相对成熟,因此未来 MEMS 激光雷达还有较大的 降本空间。
在进一步实现大规模上车前,当下主流的 MEMS 方案仍需克服核心零 部件的工作稳定性及可靠性问题。MEMS 振镜所使用的微振镜镜面直 径通常只有几毫米,其核心结构为尺寸极小的悬臂梁。双轴 MEMS 方 案的悬臂梁分为细且长的慢轴(垂直方向,纵轴)和短且粗的快轴 (水平方向,横轴),由于悬臂梁结构十分脆弱,因此车辆在行驶时 带来的震动或冲击极易影响微振镜的使用寿命及工作稳定性。
此外,MEMS 微振镜的尺寸与性能存在不可调节的矛盾。以 AEye 为 代表的公司所采用的 1mm 大小的镜子虽能使激光雷达具备更强的抗冲 击和抗振动能力,但在基于 MEMS 的设计中,孔径与镜面尺寸正相 关,过小的镜面尺寸意味着所能接收到的目标的反射光束越少,探测 距离也因此被迫降低。但如若使用直径更大的镜子则会导致对驱动振 镜振动的快轴、慢轴的负担更大,这对 MEMS 微振镜的可靠性将会是 个巨大的考验。此外,MEMS 方案的采用的半导体方案将线圈密布在 镜面背后,这对于固定在密闭机壳内的硅基 MEMS 而言尚需解决导热 性差的问题。不过综合看待,尽管存在一定的待解决问题,在全固态 激光雷达方案实现车规级验证并量产前,MEMS 方案仍正依仗其成熟 的光学组件供应链以及相对稳定的机械性能而备受激光雷达整机厂的 青睐。

纯固态激光雷达不含任何机械运动部件,天生架构紧凑且可靠性强, 将成为行业主流方案。固态式激光雷达方案的特点是其不再包含任何 机械运动部件,目前主流的固态激光雷达技术路线包括 Flash 方案、 OPA 方案等。
Flash 方案是非扫描式的全固态激光雷达方案,具备体积小、结构简 单、易过车规等优点,但同时也存在探测距离较短等劣势。Flash 闪光 激光雷达的工作原理为短时间直接发射出一大片覆盖探测区域的激 光,再以高度灵敏的接收器完成对环境周围图像的绘制。该方案的领 跑者之一 Ibeo 在其 Flash 方案产品 IbeoNext 上采用了区域扫描技术, 即一次只有一个区域在发射激光,从而实现把发射器的能量集中在一 起让每一束激光都射得更远。同时因为使用了高增益可探测单光子的 SPAD 作为接收器,探测距离得到明显的提升,该雷达实现最远 250 米 的探测距离。
目前 Flash 方案的发展趋势为将发射端和接收端做成芯片级部件,在 此之上再加上一个驱动器和主板即可做成雷达本体。因为 Flash 方案内 部不存在精密的旋转部件且于收发端实现了芯片级设计,Flash 激光雷 达过车规的难度较低且受益于 CMOS 制造工艺未来可以实现产品性能 的进一步提升。
由于 Flash 方案是在极短时间内发射大面积的激光以实现探测,且由 于使用 VCSEL 发射器而带来的光功率密度较 EEL 方案低的特点, Flash 激光雷达存在探测距离及探测精度有限的问题,目前 Flash 方案 更多适用于较低速且对探测精度不存在高要求的无人外卖车、仓储机器人等领域。除去 CMOS 工艺的技术升级外,未来进一步提升 Flash 方案性能的解决方案包括提高功率、牺牲扫描角度以强化探测距离、 采用更先进的激光发射阵列三种方法,其中由于 Flash 方案需要使用硅 单光子探测器,使用硅基材料的探测器对 800-900nm 波段附近的光最 为敏感,因此提高功率对于提升 Flash 方案性能的帮助较为有限。相对 而言,牺牲扫描角度及实现可变扫描角设计这两个方案对提升 Flash 激 光雷达的性能有明显帮助。牺牲一定扫描角度可以使 Flash 激光雷达实 现更远的探测距离,推动 Flash 激光雷达从补盲雷达向主雷达的转变。 采用更先进的激光发射阵列可以使得 Flash 激光雷达的发射单元按一定 模式导通点亮,以取得扫描器的效果。例如 IbeoNEXT 使用的 “Sequential Flashing”技术可以在每个扫描周期内实现上百次的行对行 扫描,且行对行扫描的先后顺序可以根据自动驾驶功能的实际需求而 决定。
OPA (Optical-Phased-Array,光学相控阵)方案理论上在扫描速度、可 量产性、可靠性、成本等方面具备相对优势,但在技术突破前商业化 前景仍较为渺茫。OPA 技术目前已广泛运用于军工相关领域,但在激 光雷达领域的推广应用多得益于 2012 年创立的 Quanergy 公司,目前 绝大多数 OPA 创业公司都是采用基于硅基半导体的集成光波导型相控 阵。OPA 激光雷达主要利用光学相控阵(OPA)技术来实现光束扫 描,具体技术原理为激光光源经过光分束器后进入光相位控制阵列, 通过在相位控制阵列上外加控制的方式改变光波的相位,利用光波相 位差来实现光束扫描,其原理类似于多缝干涉。具体优点包括通过使 用电光调制 OPA 方案以轻松达到 MHz 甚至 GHz 的点扫描速度,此外由于采用的阵列光栅收发结构是很好的准直光学结构、光学接收结 构、窄带滤波和自对准结构,OPA 激光雷达的生产制造在省去部分昂 贵光学原件的同时还免去了后期生产中的对准工艺。此外,OPA 激光 雷达探测系统的集成可以利用成熟的 CMOS 工艺及硅光技术,叠加 FMCW 的探测原理,OPA 激光雷达可以大幅降低外界的干扰以实现更 高的信噪比。
小型化、低功耗、易量产的 OPA 方案过于理想,实际产品制造存在较 大技术瓶颈。目前 OPA 激光雷达的产业链不成熟,中短期落地可能性 较低,具体体现在:1)小型化难度高:长距离、高性能的 OPA 需要 一个大的波束发射区域以密集地分布着数千个有源相控、耗电的发光 元件,大规模相控阵在保证 OPA 激光雷达性能的同时也限制了其小型 化的空间;2)功耗大:目前 OPA 的可见光应用受到设备体积的限 制,像素宽度较大,视野有限。因此为扩大扫描空间需使用多个 OPA 阵列,功耗也因此增大。此外采用热光效应的调制器及硅光方案本身 在与自由空间光有耦合的应用场合(例如激光雷达)会引入较大损耗 这两个因素也对 OPA 激光雷达的整体功耗有负面影响;3)旁瓣问 题:光的干涉效果易形成旁瓣。光栅衍射除了中央明纹外还会形成其 他明纹,这会导致激光在最大功率方向以外形成旁瓣,分散激光的能 量。
2.4、激光雷达组件(4):信息处理模组
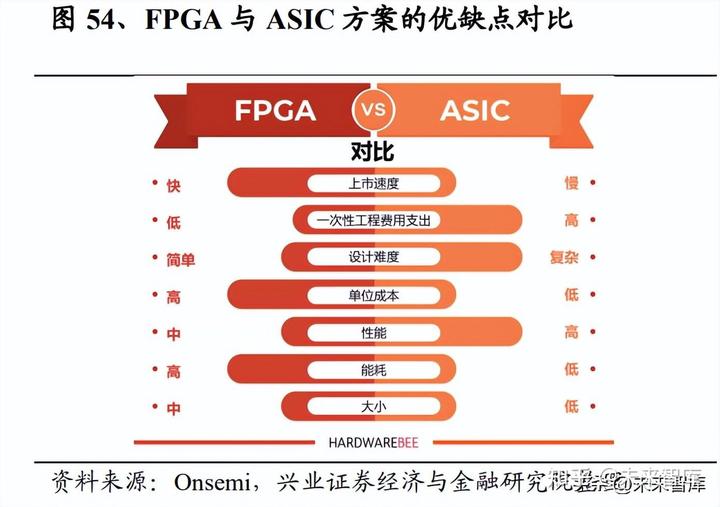
激光雷达信息处理模组正向高集成度、高良品率的趋势发展,自研 SoC 有望取代 FPGA/ASIC 成为未来主流。激光雷达信息处理系统主 要包括主控芯片和模拟芯片,其中由于目前激光雷达行业仍处于技术 研发环节,因此目前主控芯片多采用 FPGA 芯片,模拟芯片多采用 ADC 模数转换芯片。激光雷达信息处理系统经常需要处理超过 100 万 个数据点/秒的点云数据,因此激光雷达产品需要拥有一个高性能、低 功耗、可靠性强的信息处理系统。
FPGA 全称为现场可编程门阵列(Field-programmable gate array), 最初被用作加速器器件以强化基于 CPU 的 SoC 的性能,FPGA 的优 点主要包括灵活性、差异化及产品上市周期短。与 CPU 和 GPU 中的 串行架构不同,FPGA 和基于 FPGA 的 MPSoC 受益于并行处理架构, 其所具备的灵活性使其适用于需要频繁修改和升级的应用与设备。 Xilinx 赛灵思为目前激光雷达主控芯片行业中当之无愧的巨头,赛灵 思所提供的不同类型的解决方案包括:1)FPGA:Artix-7 系列、 Kintex-7 系列;2)SoC:Zynq-7000 系列;3)MPSoC:Zynq UltraScale+ MPSoC;4)RFSoC:Zynq UltraScale+ RFSoC。
ASIC 全称为专用集成电路(Application-specific integrated circuit),具体指代应特定用户要求和特定电子系统的需要而设计、 制造的集成电路。由于目前激光雷达行业仍不够成熟,即使产品量产 后内部软件也难以固化,ASIC 方案当下仅被极少数公司采纳,但考虑 到激光雷达需求量有望在近年间迎来爆发式增长,ASIC 更低的单位成 本将成为推动行业从 FPGA 转换至 ASIC 的重要因素。此外在大多数 情况下,ASIC 还可以实现更优的性能、更低的功耗、更好的热性能和 辐射抗扰度。因此,相较于更适用于原型验证的 FPGA,ASIC 则更适 用于技术已经相对定型的激光雷达雷达产品中。
激光雷达的信息处理系统目前逐步向企业自研专用单光子接收端 Soc 迁移发展,通过片内集成探测器、前端电路、算法处理电路、激光脉 冲控制等模块,能够直接输出距离、反射率信息。根据禾赛科技的预 测,未来随着线列、面阵规模的不断增大,逐步升级 CMOS 工艺节 点,单光子接收端 SoC 将实现更强的运算能力、更低的功耗和更高的 集成度,因此中长期来看企业自研 SoC 有望取代 FPGA/ASIC 的使 用。整体而言,目前激光雷达核心芯片领域的国产替代率仍较为有 限,市场主要仍被首创 FPGA 技术的 Xinlinx 赛灵思所垄断,但国内以 紫光同创为首的企业也已推出性能一定程度上可以满足激光雷达需求 的千万门级 FPGA 产品,未来有望依仗国内广阔的市场以实现技术的 快速迭代,推动激光雷达制造成本的进一步下探。
3、激光雷达整机厂核心竞争力:短期看产品能力、长期看技术水平
短期的量产能力决定企业能否进入下游客户供应链,并产生规模效应 从而在激烈的竞争中存活下来;长期考察公司技术路线的选择是否正 确,着重观察该技术方向的降本潜力。这两个维度共同决定了一家激 光雷达企业短长期分别能否紧跟行业发展趋势并在盈利的前提下持续 扩大市场份额。
3.1、短期来看,产品能力决定企业能否进入下游客户供应链
下游企业在筛选潜在合作激光雷达厂商时主要考量一家公司的产品矩 阵是否能满足“有得选、性能好、降本空间大”的需求。因此产品维度 下应重点关注产品矩阵丰富性、旗舰产品性能以及产业链成熟度,这 三个因素共同影响激光雷达公司的可获取市场规模以及中短期盈利能 力两个重要指标。 横向比较八大激光雷达企业的 10 款主打 ADAS/自动驾驶的旗舰产 品,目前除 Aeva 及 AEye 外其他六家企业已基本实现车规级量产能力 这六家企业有望成为中短期内激光雷达市场的主要竞争者。
Aeva 的第一代按产品 Aeries I 虽已宣布将在 2023 年 Q4 实现量产,但 由于该产品主要用于产品测试以及为后续的研发提供支持,其并不能 满足车规级的可靠性要求,因此下图并未包含 Aeries I。而其第二代产 品 Aeries II 目前公开数据有限,具体能否实现预期的性能仍有较大的 不确定性。AEye 主打 AI 驱动的智能传感平台 4Sight,其单独的激光 雷达产品目前是通过汽车零部件供应商大陆集团完成汽车级标准的制 造、验证和测试,预计将于 2024 年实现量产。
综合对比激光雷达企业当前旗舰产品参数与量产进度。 我们的判断一:国内企业已经打入下游客户供应链,短期竞争力领 先。禾赛科技、速腾聚创、图达通三家国产企业与下游客户合作较为 顺利。自 2021 年开始,速腾聚创的激光雷达便搭载于 Lucid Air、上汽 智己 L7、小鹏 G9 等车型;图达通则与蔚来汽车深度绑定,蔚来 2022 年发布的 ET7、ES7、ET5 均会标配图达通激光雷达;禾赛科技则与理 想汽车建立合作,半固态激光雷达 AT128 将会搭载在理想 2022 年旗 舰车型理想 L9 上。
我们的判断二:Luminar 产品综合性能最强且即将实现量产。激光雷 达产品的优异性能是帮助 Luminar 成为目前最受资本市场青睐车载激 光雷达公司的关键因素,在 10%反射率下高达 250 米的探测距离以及 正负 1 厘米的探测精度使得多家下游大型车企与其达成战略合作协 议。Luminar 产品的高性能需要依仗高成本的 1550nm 光纤激光器以及 InGaAS 探测器,先前市场对于 Luminar Iris 的降本空间以及规模量产 能力仍存有一定疑虑,但 Luminar 目前正在如火如荼进行中的产业链 垂直整合正在帮助实现大幅降本,未来有望实现 100 美元的 BOM 目 标。量产进度方面,Luminar 计划在 2022 年底量产其旗舰产品 Iris,并 在 2023 年搭载于量产车型沃尔沃 XC90 与 Polestar 3,并更进一步计划 在 2023 年下半年将产能提升至 25 万台。
我们的判断三:AEVA Aeries II 和 Ouster DF 系列量产将开启技术之 争。 采用 FMCW 技术的 AEVA Aeries II 预计在 2024 年量产,Ouster DF 系列产品将于 2025 年量产。预计中期 2025 年的激光雷达市场将以 全固态 Flash 方案以及成熟 FMCW 方案的竞争作为主旋律。
3.2、长期来看,技术水平决定企业能否长期保持竞争力
量产能力及技术优越性共同决定企业盈利能力,中长期时间线下各激 光雷达企业面临技术路线统一的发展趋势,无法实现向全固态式激光 雷达方案转变的企业将逐渐退出车用激光雷达市场。尽管目前已经实 现量产或即将实现量产的激光雷达产品皆为机械式或半固态产品,当下主流半固态主激光雷达方案在未来将无法满足车企对于优异探测性 能以及稳定工作能力的超高要求,因此以 Flash 为首的纯固态方案将会 是成为激光雷达市场主流。
具体收发模组方面,以 Luminar 为典型代表的“1550nm 光纤激光器 +InGaAs 探测器”方案在即将实现量产的同时还具备了行业领先的技 术壁垒,叠加对多家上游核心零部件厂商的纵向收购,Luminar 已经具 备一定的成本把控能力,因此有望在行业内持续保持强竞争力。相较 而言,850/865nm 波长技术方案虽凭借成熟的硅光技术拥有先天的制 造成本优势,但由于受人眼安全功率限制所带来的有限探测距离缺陷 使得其较难赢得汽车 OEM 的定点。但 Ouster 及禾赛科技在激光雷达 发射端所采取的的 VCSEL 技术行业向全固态激光雷达方案发展的不可 逆趋势,未来重点关注 VCSEL 方案激光器在更高波段的使用以及 OPA 激光雷达的商业化进程。此外,FMCW 相较于 dToF 方案在探测 精确性以及实时速度检测方面的优势有望助力其在未来发展成为主流 测距原理。
综上所述,我们认为未来激光雷达行业的竞争本质上是技术优劣性的 竞争,产品优异的综合性能将成为推动成本进一步下探的关键因素。
3.3、中长期两个决定激光雷达企业发展的因素,我们认为国产激光雷达产业链将高速发展并带动国产激光雷达品牌实现弯道超车,具体三点理由如下:
1) 国内企业靠近下游市场且对激光雷达接受度高,2022 年下半年即 将大规模上量。在汽车智能化及大力推广新能源汽车的大环境下, 为提高产品的竞争力,相较于国外老牌汽车企业,国内新老车企对 于激光雷达这类“新事物”的接受程度更高。2022 年开始逐渐有配备 图达通的 ET7、配备 Livox 的小鹏 P5 等车型上市,2022 年下半年 还有配备禾赛科技产品的理想 L9 等车型上市,2022 年下半年装机 的激光雷达数量将成倍提高。在中短期内我们认为华为在阿维塔、 极狐、长城等车企的订单将帮助华为成为国内出货量最大的激光雷 达企业,其次是拥有较多客户的速腾聚创、图达通、禾赛科技。 国外企业 Luminar 出货量相对较高,但与国内企业相比依然差距巨 大。
2)产学研一体化打通行业上中下游,国内企业研发能力日益增强。目 前国内激光雷达头部企业多将中心放在前瞻性的半固态及全固态激光 雷达技术路线上,企业与科研机构及学校的一体化协作为技术创新提 供源源不断的动力。据 2020 年底佐思汽研的统计,在激光雷达专利数 量最多的 28 家的机构中,中国企业和大学的上榜数量达 13 家。根据 车用激光雷达 2018 至 2021 年的专利地图也可以发现禾赛科技、速腾 聚创、文远知行、舜宇光学科技等企业依然成为行业的 IP 挑战者以及 潜在 IP 挑战者。具体企业专业方面,禾赛科技凭借自主研发的微振镜 和波形加密技术引领传感器创新的发展方向,公司在全球范围内均有 专利布局,客户遍布全球 23 个国家和地区的 70+座城市;速腾聚创, 获得得超过 600 项专利,其产品技术的领先建立在多学科多层级的技 术积累之上;华为激光雷达专利累计 67 个(2016 年-2020 年末),包 括激光发射与接收、扫描系统和信息处理。
3)国内车企与国内激光雷达厂家配合度更高。制造具备优异性能的激 光雷达与提供配套融合方案自动驾驶解决方案是两种截然不同的工 作,高性能的激光雷达提供的是感知端的系统,然而有效处理来源于激光雷达巨量数据对于大部分车企而言并不是一件易事。一套完善的 自动驾驶解决方案重点需要解决决策层的多传感器数据的融合问题以 及通过芯片及算法实现行为规划和运动规划,这部分功能的实现需要 车企与激光雷达整机厂进行深度合作以最大能力发挥激光雷达的性 能。目前国外激光雷达企业较难为中国车企提供这类定制化的服务支 持,因此中国车企如希望采用外国企业的软件则需要花费额外的时间 及金钱开销。而中国激光雷达企业的可提供的定制化服务能力有利于 它们与国外公司竞争。
4、国内外激光雷达整机厂重点企业分析
4.1.1、Luminar(LAZR.O):1550nm高性能方案助力激光雷达前装上车,上游不断垂直整合促进成本下探,下游绑定吉利控股集团拥有稳定客户
Luminar 成立于 2012 年,其主要技术路线为 1550nm+磷化铟光纤激光 器+砷化铟镓(InGaAs)探测器+半固态激光雷达。其核心产品 Luminar Iris 在激光器上的创新使其获得了主流汽车 OEM 的认可,具 体表现在 1550nm 波段的选择使得激光能够在保障人眼安全的前提下 以更高的功率发射。通过配套使用技术要求更高的 InGaAs 探测器, Luminar Iris 激光雷达拥有测距距离远、测距精度高等优异性能。在行 业仍在探索最优技术路线之时,Luminar 在激光器及探测器方面的技术 创新是对几乎所有激光雷达收发模组核心零部件的技术创新,无论最 终选择何种技术路线,功率的提升都将帮助实现更强的探测性能,因 此“1550nm+InGaAs 探测器”方案帮助 Luminar 在行业内建立了较高的 技术壁垒。
Luminar 已经实现对激光雷达上游核心组件产业链的垂直整合。公司 于 2017 年收购上游定制信号处理芯片设计厂商 Black Forest Engineering (BFE),后又于 2021 年及 2022 年完成了对上游接收器及激 光器企业 Optogration 及 Freedom Photonics 的收购。通过收购长期合作 的关键上游公司,Luminar 希望以此最大程度地降低创新材料及技术对 于产品高昂的制造成本。产能方面,公司计划在 2023 年下半年达到 25 万台/年的产能。
公司客户众多并吉利控股集团组成联盟,2023 年产品即将落地,前景 广阔。截至当下,Luminar 已与丰田、沃尔沃、奔驰、日产等大型车企 建立了研发合作关系,未来有望借助在合作项目数量上的优势实现企 业高速发展。在众多的客户中, Luminar 与吉利控股集团合作尤为密切。在 2023 年初,Luminar Iris 将会在沃尔沃下一代旗舰 SUV XC90 和 Polestar 的旗舰 SUV Polestar 3 上量产,同时 Luminar 还投资了吉利 旗下的汽车智能化公司亿咖通。
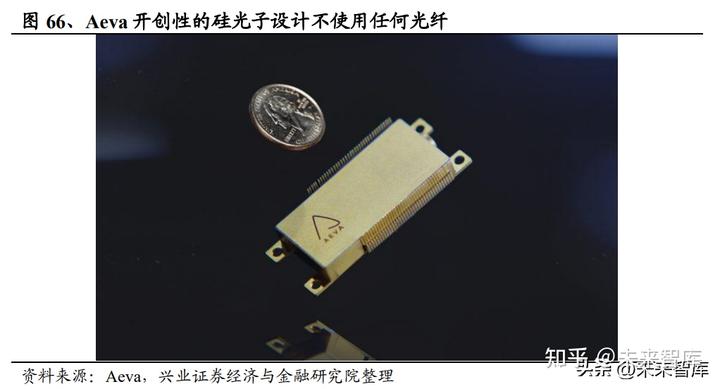
4.1.2、Aeva(AEVA.N):专注芯片化FMCW方案激光雷达
Aeva 成立于 2017 年,公司致力于通过使用 FMCW 技术路线为自动驾 驶汽车及其他领域开发下一代传感和感知技术,公司产品包括 Aeries I 及 Aeries II。Aeva 的 FMCW 芯片级激光雷达(LiDAR-on-chip)技术是汽 车行业首个提供远距离探测性能和即时测速的技术,其中公司第一代 产品 Aeries I 是全球首个可以满足汽车及工业领域感知需求的 4D 激光 雷达感知系统,通过采用非市场主流但技术更为超前的 FMCW 测距原 理,Aeva 的感知系统将激光雷达、相机及其他电子器件集成到单个系 统中以产出极其丰富的感知数据。与摄像头、毫米波雷达及传统 3D TOF 技术激光雷达相比,Aeva 的 4D 激光雷达是理论上唯一能满足所 有感知要求的传感器方案。
FMCW 激光雷达可根据多普勒效应直接判断动态物体,未来有可能颠 覆行业。Aeva 选择的 FMCW 路线目前仍存在技术路线难度高以及生 产制造成本高的问题,但方案本身具备的长有效探测距离、可获取速 度维数据以及抗干扰能力强的优势有望提升 FMCW 方案未来的渗透 率。而 Aeva 也有望凭借在 FMCW 方案提前布局的优势在激光雷达市 场的竞争中胜出一筹。
FMCW 硅光芯片化有利于减小尺寸、降低成本,提升性能、集成度、 一致性与可靠性。相较于 ToF 测距法,当前市场 FMCW 激光雷达大 多处于概念机的阶段,且大多采用分立的光学组件,分立组件通常尺 寸较大,随之而来的还有系统可靠性、生产成本、功耗等诸多问题。 比起 ToF 激光雷达,FMCW 激光雷达在抗干扰、灵敏度、动态范围、 信息获取等方面有一定的优势。当前基于成熟 CMOS 工艺的硅基光电 子技术已广泛应用于通信系统,将硅基光电子技术应用到 FMCW 系统 可以很大程度减小光学信号处理模块的尺寸并降低功耗,提升系统的 性能、集成度、一致性与可靠性。目前 Aeva 的 4D 激光雷达芯片模组 已经实现将激光发射器、光学元件和接收器等核心组件集成到单颗硅 光子芯片上。
与多家产业链上游企业深度合作,Aeva 第二代产品已于 2022Q2 交付 验证。目前 Aeva 已与先进精密光学和电子制造服务领先供应商 Fabrinet 及全球最大的汽车 Tier 1 之一采埃孚(ZF)建立生产合作伙伴关系。根据协议,Aeva 将使用 Fabrinet 在泰国的一条产线以生产 Aeva 第三代的 4D 激光雷达芯片模组,Fabrinet 同时将帮助 Aeva 的芯片模 组实现产能爬坡。根据 Aeva 与采埃孚的合作协议,Aeva 负责其激光 雷达感知系统的核心传感功能、性能及算法,采埃孚负责生产符合汽 车主机厂要求的车规级传感器。此外 Aeva 也已宣布与尼康达成战略合 作,此举有望帮助具有微米级测量能力的调频连续波(FMCW)4D 激 光雷达(LiDAR)应用于高精度工业自动化以及计量应用,加快 Aeva 产品向工业应用领域的扩张。目前 Aeva Aeries II 的首个单元已成功制 造,初步系统及性能验证也已完成。根据公司第二季度最新的信息, 首个 Aeries II 单元已于第二季度成功向客户交付。
4.1.3、Innoviz (INVZ.O):车规级MEMS方案先行者,大规模上车即将实现
Innoviz 成立于 2016 年,四位联合创始人均来自以色列国防军情报部 队精英技术部门,其发展得到了顶级战略合作伙伴和投资者的支持, 包括软银风险投资(SoftBank Ventures Asia)、三星(Samsung)、麦格纳 国际(Magna International)等。 Innoviz 采取的主要路线为 MEMS 半固态路线,产品包括 InnovizOne、 InnovizTwo、Innoviz360 及感知软件。目前 Innoviz 的主打产品 InnovizTwo 主要聚焦 L2+级别的自动驾驶,InnovizTwo 与前代产品使 用了同样的 950nm 激光器技术以及专利 ASIC,不同之处在于探测器 的光子探测效率更高、扫描模组有所改进以及激光发射器数量减少, 经过结构及制造过程简化后的 InnovizTwo 激光雷达可以在提高性能的 同时降低 70%的成本。由于硬件支持 L3 甚至 L4 级自动驾驶,因此 Innoviz 计划未来通过软件升级的方式帮助车辆实现 L3 级自动驾驶。
作为业界首家将 MEMS 激光雷达推向汽车消费市场的公司,Innoviz 激光雷达性能强且制造成本相对低的特点使得其较早地就与大型汽车 OEM 达成了合作。早在 2018 年 Innoviz 便已宣布通过 Tier1 麦格纳与 宝马达成了合作拿到了宝马 iX 定点,然而 Innoviz 与宝马的合作并非 一帆风顺。虽然宝马 iX 已顺利于 2021 年发售,但原先计划部署的 InnovizOne 激光雷达并未出现在宝马 iX 的配置单上。根据目前宝马今 年 4 月份公布的最新消息,Innoviz 的激光雷达将被部署在宝马新 7 系 的前格栅上,这将是宝马首台搭载激光雷达的量产车型,目前全新一 代宝马 7 系/i7 近期已在德国丁戈尔芬工厂量产下线,预计今年 10 月起 陆续交付。从 2018 年宣布达成合作到 2021 年上车宝马 iX 车型的推迟 再到计划于新 7 系上车,Innoviz 与宝马合作的波折也反映了拿到 OEM 定点与实际交付间仍存在较大的未知数。Innoviz 于季报中列举的风险 中也提及了与宝马 L3 项目的合作顺利与否将对公司的业务有重大影 响。为规避过度依赖单一汽车市场的不确定风险,Innoviz 目前也正在 研发针对汽车及非汽车市场的全视角激光雷达产品 Innoviz360,未来 有望以此提升公司非汽车业务板块的市场份额。
4.1.4、AEye(LIDR.O):软件定义商业模式下的多传感器融合方案先驱
自适应高性能激光雷达解决方案供应商 AEye 由具备国防领域背景的 现 CTO Luis Dussan 于 2013 年在加州创立,公司旨在打造一个比人眼 和视觉皮层表现更好的人工智能驱动传感系统。公司创建初期 Aeye 便 创新性地提出了 iDAR(Intelligent Detection and Ranging,智能探测及 测距)系统,iDAR 在设计时便采用了国防产业中的自动锁定技术以及 仿生学技术。
AEye 目前的主要产品为 AI 驱动的智能传感平台 4Sight,4Sight 基于 完整的 iDAR 软件平台,旨在利用 AI 技术对多传感器信息进行优化融 合以解决独立传感器融合困难的问题。总体而言,相较于传统激光雷 达方案,AEye 搭载自适应激光雷达的 4Sight 平台具备以下优点:1) 单颗雷达可以通过软件设定为客户提供多种特定的集成及封装方案, 在不影响激光雷达性能的同时赋予整车厂更高的灵活性,2)AEye 的 软件平台可对多传感器数据进行前融合处理,例如除处理激光雷达的 点云数据外还能同时融合高精地图数据、摄像头图像数据以及 IMU 数 据,3)使用收发分置架构,通过分离发射与接收光路以避免同轴光干 扰问题,叠加高功率 1550nm 光纤激光器,进一步提升光学性能,4) 采用直径为 1mm 的 MEMS 振镜,远小于竞品 3-10mm 的平均水平, 相较同业公司的 MEMS 方案在高谐振频率、低惯性等指标上具备明显 优势。

第三方测试检验产品性能,四项关键性能指标远超当下主流产品。根 据专注于主动安全和自动控制技术的应用研究公司 VSI Labs 对 AEye iDAR 平台的性能测试结果,AEye iDAR 实现了其所宣传的四个激光雷达关键性能指标的数据,具体测试结果如下:距离(于 1018 米 10Hz 帧速率的情况下识别货车及 SUV、分辨率(在 200 米的距离下实现水 平及垂直 0.025°的分辨率,即点云密度为 1600 点每平方度)、扫描速 度(最高帧速率可超过 200Hz)、传感器集成灵活性(安装于例如挡 风玻璃的第一表面后仅会导致小于 10%的性能降低)。根据研究结 果,VSI Labs 验证了相较于市场上的主流激光雷达产品,AEye 的 iDAR 平台可以实现“超过 4 倍的探测距离,超过 5 倍的分辨率,扫描 速度超过目前市场上激光雷达设备 10 倍”的惊艳数据。
4.1.5、Ouster(OUST.N):“VCSEL+SPAD”全固态Flash方案推广者
Ouster 成立于 2015 年,是全球首家研发并量产数字激光雷达的公司, 公司致力于打造高可靠性、小体积、低成本的激光雷达产品。Ouster 开创性地采取了近似于 Flash 的技术路线,并通过全集成、全半导体的 设计使得 Ouster 仅用两颗芯片便取代了传统激光雷达中堆积的上百个 激光发射器和接收器。具体产品架构方面,Ouster 激光雷达的发射端 (VCSEL)和接收端(SPAD)都已做成芯片级部件,再加上一个驱 动器和主板便可组装成激光雷达整机。简化的结构使得过车规的难度 大幅降度,激光雷达的成本控制问题对于 Ouster 方案而言也不再是个 难题。
苹果背书“VCSEL+SPAD”技术路线加快产业链发展,专利技术帮助 Ouster 改善探测性能不足。苹果在 Ipad Pro 产品上也使用了“VCSEL + SPAD”方案的激光雷达以提供更精确的环境 3D 深度信息以改善 AR 体 验。相较于苹果采用的相对较基础及简单的“VCSEL+SPAD”方案(探 测距离最远仅 5 米),Ouster 在同样的技术基础上研发了一个更加先 进的、自有专利的光学系统使得探测性能大幅提升。苹果对于 VCSEL 和 SPAD 的应用是对 Ouster 技术路线的强有力背书,同时也将刺激产 业链企业加大投入,这将直接利好处于产业链中游的 Ouster 持续降 本。
VCSEL 激光器受功率限制无法实现远距离探测,产品有效探测距离低 是束缚 Ouster 产品实现乘用车前装上车的核心因素。不同于市面上常 见的 905nm 及 1550nm 方案,Ouster 选择 850nm 方案的主要原因为850nm 波段 VCSEL 商用化程度最为成熟且接收端使用的硅基材料对近 红外光更为敏感。但受限于 850nm 方案较低的人眼安全功率,目前 OS 系列产品的最远探测距离为 240 米,且根据 2020 年 Ouster 公布的 第二代激光雷达数据,公司目前等效线数最高的 OS1-128 激光雷达的 有效探测距离为 50m,即最远可以在 50m 的距离接收到来自一个身高 1 米 8 的行人的 4 行点云反馈,因此我们认为有效探测距离有限是限制 Ouster 激光雷达作为前向激光雷达上车的根本原因。目前 Ouster 产品 性能的提升主要依靠硅基 CMOS 技术的快速发展、等效线数的提升以 及 SoC 及固件的更新,具体体现在自 2015 年 Ouster 首次设计了数字 激光雷达之后其 VCSEL 和 SPAD 的性能已提升了十倍,因此 Ouster 产品可以在不改变核心技术的前提下实现性能增长也是其创新方案的 一大优点。此外,如能在收发端采用如 905nm 的更高波长的芯片化方 案,Ouster 产品也将受益于更高功率激光所带来的的性能提升。目前 Ouster 所发布的 5 个硬件版本中仅有 2017 年 12 月首次发布的 OS1 系 列激光雷达所搭载的第一代硬件是采用 855nm 波长,此后的 Rev C、 Rev D、Rev 05、Rev 06 四代硬件都使用 的 865nm 波长。

产品降维推动技术验证及量产,多下游领域同时发力,毛利率维持在 30%。Ouster 虽志在生产全固态 Flash 激光雷达,但由于全固态产品的 落地仍存在一定难度,目前宣布已实现全型号量产的 OS 系列激光雷 达本质上还是其全固态方案的降维产品,即采用 Flash 技术的旋转式激 光雷达。产品降维帮助 Ouster 快速实现了产品的量产并率先抢占对距 离及探测精度要求相对较低的采矿、仓储等细分领域的市场,在产品 及技术得到市场验证的同时还维护了企业现金流的健康。自公司成立 以来激光雷达出货量已经突破 10,000 台,同时自 2021 年第四季度以来,公司毛利率一直维持在 30%以上,是美国第一家毛利为正的激光 雷达企业。此外,Ouster 拥有多样化的客户群体且目前的营收对于单 一客户的依赖性小,截至 2022 年第一季度 Ouster 已达成 72 个战略客 户协议(Strategic Customer Agreements、SCAs)。此外,根据 2021 年 的财报,Ouster 2021 年全年共向超过 50 个国家的 600 个客户出售了传 感器,且其中不存在任何一个收入占比超 10%的客户。这意味着 Ouster 相对其他公司而言更不容易受到与下游大公司合作更改或延期 所带来的负面影响。
公司核心产品线是 DF 系列全固态激光雷达,预计上市时间在 2025 年。 DF 系列激光雷达由 5 个激光雷达组成,分位短距、中距、长距三 种规格,可配置在整车前后左右,预计价格在 SOP 时可降至 1000 美 金,可在 1 秒钟之内生成 1300 万个点云数据。
4.1.6、Velodyne(VLDR.O):汽车激光雷达领域领先者,转型似乎不顺
Velodyne 成立于 1983 年,在汽车激光雷达市场具有明显的先发优 势,目前公司的主要营收来源于机械式激光雷达的销售,截至 2022 年 Q2 公司已经成功向客户发出超过 73000 个传感器。根据 Yole 于 2021 年发布的报告, Velodyne 占车用激光雷达市场最高份额。然而, Velodyne 虽最早涉足自动驾驶,但由于其主打产品为机械式结构, Velodyne 2020 年第二季度在自动驾驶汽车板块的营收占比已下滑至总 收入的四分之一。公司正在谋求技术路线转型,但截止 2022 年 8 月暂 时没有量产项目与公司合作。
4.1.7、禾赛科技:“VCSEL+一维转镜”方案收获多家车企定点
禾赛科技成立于 2014 年 10 月,是全球自动驾驶及高级辅助驾驶 (ADAS)激光雷达的领军企业,同时也是国标 GB/T《车载激光雷达性 能要求及试验方法》的唯一牵头单位(百度为联合牵头单位),为激 光雷达行业的规范化发展奠定了坚实的根基。 2016 年前禾赛科技的主要产品为激光气体传感器,2016 年后公司在原 有激光气体遥感技术的积累下向无人驾驶激光雷达新领域拓展,坚持 “长、中、 短距兼备,机械、固态方案并进”的产品矩阵,目前已推出 AT、Pandar、QT、XT 四个系列的激光雷达产品,应用场景涵盖无人 驾驶、高级驾驶辅助、机器人以及车联网等,目前最新一代产品为车 规级半固态激光雷达 AT128。
产品性能突出拿下多家车企定点,自建工厂实现大规模量产。公司在 创业初期走机械旋转的技术路线,推出多款 Pandar 系列机械旋转方案 的激光雷达。但中期认知到机械方案的不足后迅速切换技术方向,于 2018 推出 MEMS 方案的 Pandar GT,并在 AT128 中采用“多激光器+一 维转镜”的技术路线,技术路线的转换可以认为是禾赛科技对转镜式方 案更易过车规的考虑。
4.1.8、速腾聚创:机械式方案入局,高性价比MEMS激光雷达获得广泛车企青睐
速腾聚创(RoboSense)成立于 2014 年,是全球领先的智能激光雷达 系统科技企业,同时也是多线机械旋转雷达产品在国内机器人市场的 主要供应商之一,目前已完成多轮拥有明星投资方参与的战略投资。 公司创立初期以研发生产旋转机械式激光雷达为主,2016 年后开始自 主研发 MEMS 激光雷达,激光雷达产品线包括车规级固态激光雷达 RS-LiDAR-M1(以下简称速腾 M1)、超高分辨率 128 线激光雷达 RSRuby、高精度近场补盲激光雷达 RS-Bpearl 等。软件方面速腾聚创目 前已推出面向 L4+激光雷达感知融合方案的 RS-Fusion-P5、面向低速 自动驾驶场景的 RS-P1 以及面向车路协同解决方案的 RS-V2X。 行业标准制定方面,速腾和万集联合牵头负责 QC/T《MEMS 型车载激 光雷达》汽车行业(推荐性)标准的制定,这也佐证了速腾聚创目前 在国内 MEMS 激光雷达领域的领先地位。
打造全球首款智能可变焦激光雷达,旗舰产品率先实现车规量产交 付。速腾聚创目前的旗舰产品为采用“5 组 EEL 光源+MEMS”方案的速 腾 M1,速腾 M1 具备结构极致精简,体积尺寸极小、点云质量出色等 优点,且相较于第一代产品,第二代 M1 激光雷达具备“凝视”功能, 这使得 M1 可以实现 0.2°到 0.05°分辨率的智能调控以发现并精准识别 障碍物,帮助车辆完成快速响应。且得益于独有专利的核心器件设计 以及芯片化设计,速腾聚创极大地降低了 M1 的生产成本。为提升量 产能力,速腾聚创一方面在 2021 年 3 月落成了首条车规固态激光雷达 产线,其次还通过广泛发展上下游产业链合作伙伴提升交付能力,目 前已与德州仪器、立讯集团等公司达成战略合作协议。速腾聚创目前 已率先于 2021 年 6 月启动向 Lucid 的车规量产交付,此外,目前速腾 M1 激光雷达已获得比亚迪、广汽埃安、威马汽车、极氪、路特斯等多个项目 40 余款车型的定点订单,其中广汽埃安 AION LX Plus 分别于 车顶以及前轮拱中部安装了三颗速腾 M1 激光雷达。
4.1.9、华为:前瞻性战略投资叠加技术积累助力推出高性能产品
提前布局相关半导体板块,光通讯领域技术多年积累助力打造激光雷 达产品。自 2019 年 4 月成立以来,华为哈勃投资主要开展半导体与集 成电路,芯片产业链的投资布局,具体投资布局包括炬光科技、长光 华芯、纵慧芯光、南京芯视界、深迪半导体等激光雷达相关企业,强 化了自身在智能汽车部件产业的地位。叠加深耕信息与通信技术领域 三十多年的经验,华为已建立了第一条车规级激光雷达的试产线,并 计划按照年产 10 万套/线的目标推进。
产品定点情况方面,2020 年 12 月 21 日华为在中国汽车工业协会主办 的 T10ICVCTO 峰会上首次面向行业正式发布车规级高性能激光雷达 产品和解决方案,其中便包括已经上车极狐阿尔法 S 华为 HI 版的华为 96 线中长距激光雷达。该激光雷达的在 10%反射率下的探测距离为 150 米,且水平及垂直方向上的线数皆均匀分布,同时 25Hz 的高帧率 也助力其成为被多家车企选中的前装激光雷达。目前除极狐阿尔法 S 外,已宣布搭载华为激光雷达的车型还包括阿维塔 11、机甲龙及哪吒 S。
5、激光雷达产业链重点企业分析
产业链垂直整合趋势显著,激光雷达公司往上下游布局加速。激光雷 达成本过高阻碍激光雷达渗透率,为此激光雷达企业降本需求大。加 速上下游布局成为其降低成本的重要措施。传统的激光雷达供应商关 系为元器件供应商→激光雷达整机厂→Tier 1→OEM 的链式关系,目 前激光雷达企业收购上游零部件供应商并直接向 OEM 供货,成为当前 激光雷达行业的一个发展趋势。
产业整合最为彻底是 Luminar,其通过收购的方式在激光雷达最核心的 三大零部件(发射模组、接收模组、消息处理模组)领域均有布局; 同时公司还将价值量较低的组装、测试环节外包给其他合作伙伴。传统 Tier1 均胜电子也战略入股图达通,将于图达通一起设计&建立产 线。技术壁垒相对较高的激光器及探测器组件方面:虽然性能仍与国外一流 产品存在一定差距,但国内生产的零部件性能已可以满足激光雷达的 应用需求,国内公司已经具备一定的国产替代能力。
5.1.1、长光华芯,领先的VCSEL研发和制造商:
长光华芯成立于 2012 年,公司聚焦半导体激光行业,始终专注于半导 体激光芯片、器件及模块等激光行业核心元器件的研发、制造及销 售。紧跟下游市场发展趋势,不断创新生产工艺,布局产品线,已形 成由半导体激光芯片、器件、模块及直接半导体激光器构成的四大 类、多系列产品矩阵。公司致力于高性能 VCSEL 芯片的设计、研发、 生产及销售,先后攻克器件设计、外延生长、芯片制造等多项技术。
经过多年的研发和产业化积累,针对半导体激光行业核心的芯片环 节,公司已建成覆盖芯片设计、外延、光刻、解理/镀膜、封装测试、 光纤耦合等 IDM 全流程工艺平台和 3 寸、6 寸量产线,目前 3 寸量产 线为半导体激光行业内的主流产线规格,而 6 寸量产线为该行业内最 大尺寸的产线,相当于是硅基半导体的 12 寸量产线,应用于多款半 导体激光芯片开发,突破一系列关键技术,是少数研发和量产高功率 半导体激光芯片的公司之一。同时,依托公司半导体激光芯片的技术 优势,公司业务向下游延伸,开发器件、模块及终端直接半导体激光 器,上下游协同发展,公司在半导体激光行业的综合实力逐步提升。

5.1.2、炬光科技:专注于产生光子和调控光子的激光雷达公司
公司从事激光行业上游的高功率半导体激光元器件(“产生光子”)、 激光光学元器件(“调控光子”)的研发、生产和销售,目前正在拓展 激光行业中游的光子应用模块和系统(“提供解决方案”,包括激光雷 达发射模组和 UV-L 光学系统等)的研发、生产和销售。公司为固体 激光器、光纤激光器生产企业和科研院所,医疗美容设备、工业制造 设备、光刻机核心部件生产商,激光雷达整机企业,半导体和平板显 示设备制造商等提供核心元器件及应用解决方案,产品逐步被应用于 先进制造、医疗健康、科学研究、汽车应用、信息技术五大领域。
车载应用方面:炬光科技正在面向智能驾驶激光雷达(LiDAR)、智 能舱内驾驶员监控系统(DMS)等汽车创新光子应用领域进行产品开 发和核心能力建立。炬光科技于 2016 年起开始研发的高峰值功率固态 激光雷达面光源已与汽车客户签订供货合同,现已进入批量生产阶 段。2020 年炬光科技已通过 IATF16949 质量管理体系认证、德国汽车 工业协会 VDA6.3 过程审核,拥有车规级激光雷达发射模组设计、开 发、可靠性验证、批量生产等核心能力,并通过首个汽车量产项目积 累了大量可靠性设计及验证经验。炬光科技已与北美、欧洲、亚洲多 家知名企业达成合作意向或建立合作项目。
5.1.3、德明利:VCSEL新玩家,探索产业化机会
德明利成立于 2008 年 11 月,为一家专业从事集成电路设计、研发及 产业化应用的国家高新技术企业。经过 10 余年发展,公司以数据存储 业务为基础,并积极横向布局新一代信息技术产业,已将业务拓展至 以数据采集为核心应用方向的人机交互触控领域和以数据传递为核心 应用方向的光电通讯领域。 在光电通讯领域,公司通过于 2020 年 6 月成立全资子公司德明利光电 并组建光通讯产品研发团队,以 VCSEL 光芯片的设计、研发及产业化 应用为运营方向,旨在满足智能终端、无人驾驶汽车等新一代信息技 术产品快速增长的产业化应用需求,其组织实施的 VCSEL 光芯片项目 获得深圳市 2020 年度和 2021 年度重大项目立项,目前处于产业化应 用探索阶段。

5.1.4、永新光学:精密仪器切入激光雷达,有望实现
5 年 5 倍的目标 永新光学主要生产光学仪器以及光学元件零组件研发生产,是精密光 学仪器及核心光学部件制造商。近年来公司积极推出液体变焦镜头、 光刻镜头等高端产品,尤其是自动驾驶激光雷达光学元组件,研发制造能力位于业内领先地位,已先后与 Quanergy、禾赛、Innoviz、麦格 纳等激光雷达领域的国内外知名企业建立合作。未来激光雷达业务有 望成为公司成长新动能。2021 年公司提出五年战略规划,计划通过 5 年时间,实现 5 倍产值规模和 5 倍效率提升。
5.1.5、舜宇光学科技:车载摄像头切入激光雷达,经验丰富技术领先
舜宇光学科技是全球领先的综合光学零件及产品制造商。公司专业从 事光学及光电相关产品设计、研发、生产及销售,主要产品包括三大 类:一是光学零组件,主要包括玻璃/塑料镜片、平面产品、手机镜 头、车载镜头、安防监控镜头及其他各种镜头;二是光电产品,主要 包括手机摄像模组、3D 光电模组、车载模组及其他光电模组;三是光 学仪器,主要包括显微镜及智能检测设备等。目前,公司已经形成了 手机行业、汽车行业、安防行业、显微仪器行业、机器人行业、 AR/VR 行业、工业检测行业、医疗检测行业八大事业板块。其中车载 镜头的市场占有率连续多年位居全球首位,手机镜头、手机摄像模组 市场占有率位居全球第一。 激光雷达方面公司主要负责提供汽车级光学设计和产业化专业知识, 以实现光学子系统,并为光学元件和组件提供制造服务;具体产品为 激光雷达镜头和激光雷达视窗。
(本文仅供参考,不代表我们的任何投资建议。如需使用相关信息,请参阅报告原文。)
精选报告来源:【未来智库】
上一篇:聚力推动高质量发展
下一篇:高强度超声处理用于锂电回收