洋山四期自动化码头AGV 自动换电站系统
张宇欣 朱忠烈                              &n
张宇欣 朱忠烈 摘 要:上海洋山港四期自动化码头在国内率先建成一个全自动化AGV 换电站,解决了AGV 长时间续航的问题,保证了AGV 能够24 h 全天候运作。文中简述了洋山四期自动化码头AGV 自动充电、换电站的工作原理及自动充换电作业流程。
0 引言
洋山四期自动化码头将智能化生产过程控制系统和绿色节能技术运用到自动化设备中,打造了一座自动化无人码头。项目首批50 台自动顶升AGV 采用绿色环保全锂电池为动力,相比传统燃油发动机,具有能耗小、能源效率系数高的优势;二氧化碳零排放,绿色环保;在连续续航方面,该项目AGV 配备的锂电池的配置容量满足全自动化码头8 h 以上连续作业的需求。洋山四
期AGV 项目最大特点是取电系统采用整体换电形式,为AGV 配套提供能源保障的换电站已正式投入使用。
上海振华重工首次在AGV 项目上采用此项换电技术,相较于其他取电方案,其优点在于:整体更换电池,采用集成式大容量电池包,续航时间长,可有效避免AGV 在长时间重载或长距离调度时可能存在的亏电情况;充、换电设施相对集中,方便管理,特别适用于AGV 设备较多的大型自动化码头;当电池出现故障时,可直接更换使用备用电池,避免了设备长时间等待。
整个换电站内包括16 台架载充电机、1 台换电机器人以及卷闸门、门禁系统、空调、消防系统等,而这些设备统一由充换电站管理系统(以下简称BES)进行管理。每次进行换电作业时,换电机器人需举起3.5 m3重达5.5 t 的电池包,为确保电池包能够准确无误存放到充电架或AGV 车身上,货叉安放电池的精度要控制在±3 mm 以内。为了将换电对整个运营的影响减至最
小,整个换电作业流程用时需控制在6 min 以内。从安全可靠的角度考虑,整个换电站还配备有全套消防系统、冷却通风系统、监控系统、门禁系统等保障换电站内的人员、设备的安全,见图1。 图1 AGV 充换电系统
图1 AGV 充换电系统
1 AGV 自动充换电站管理系统(BES 系统)
1.1 BES 系统配置架构
BES 系统开发遵循“基础平台+ 应用平台+ 工程配置”的设计理念。其特点:采用模块化和层次化的软件开发思想,可灵活扩展业务的处理功能;采用大型数据库与自行开发的实时数据库结合,使历史库和内存库的访问达到数据无缝连接和统一管理;系统具有完备的软硬件自诊断、自恢复功能,通过完善的进程管理系统、运行日志系统确保系统的长期稳定可靠运行。 整个BES 系统包括充电监控子系统、换电监控子系统、计量子系统、自动充换电子系统、报表统计子系统和安防子系统等,利用抽象数据模型统一描述,将系统有机融为一体进行综合设计,实现了充换电站的信息化、网络化、智能化的监控和管理。自动充换电子系统在充换电监控和AGV-MS(AGV 车辆管理系统)系统信息支持的基础上,实现无人值守条件下的自动充换电控制逻辑。见图2。
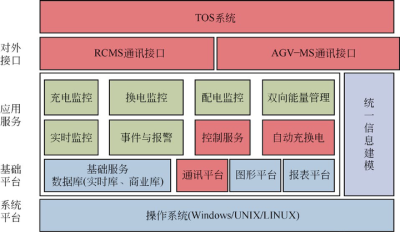
图2 BES 系统架构
充电监控子系统实时监视并控制充电机的运行状态,能够远程设定充电机相关运行参数并实时监视相关电池包的充电状态,包括SOC、充电电压、充电电流等具体数据。换电监控子系统实时监视换电设备的运行状态以及电池包更换的内容和结果,并能够实现相关控制。计量子系统监视并记录全站总电量、各充电机总电量和充电电量,用于运营管理和统计分析。报表统计子系统对充换电站的充电、换电、计量数据、报警和操作记录进行查询和统计分析。
这些子系统与上位机系统AGV-MS(码头车辆管理系统)、RCMS(远程设备管理系统)、TOS(码头运营管理系统)之间进行信息交互,从而将充换电站有机融合到港口的信息化自动系统中。
1.2 BES 系统职责划分
BES 系统由站控层、间隔层两部分组成,并用分层、分布、开放式网络实现连接,见图3。
站控层由计算机网络连接的系统主机或操作员站、视频工作站等设备构成,提供站内运行的人机界面,实现管理控制间隔层设备等功能,形成全站的监控、管理中心,并可与上级系统通讯。除站控层设备布置在充换电站内的工作站以外,其他服务器、工作站均布置在港口服务器机房内,与充换电站内的网络通过光纤通道连接。
间隔层由站内充电机监控单元、配电自动化终端、间隔层设备和各种网络、通信接口设备等构成,完成面向单元设备的监测控制等功能。
间隔层采用以太网、CAN 网、RS485 等方式连接,站控层和间隔层之间采用以太网连接,站控层各主机之间也采用以太网连接。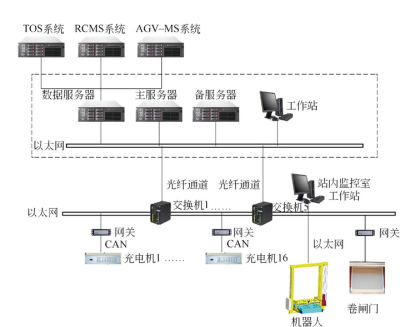
图3 BES 系统拓扑图
2 换电站充电系统
由16 台200 kW 的架载充电机完成对换电站内所有电池包的充电。架载充电机的充电流程见图4。由于电池包在架载充电机上进行充电时无法收到AGV 车的控制、状态等信息,因此,需要架载充电机对电池包内各项数据进行实时交互,从而准确切换充电状态。
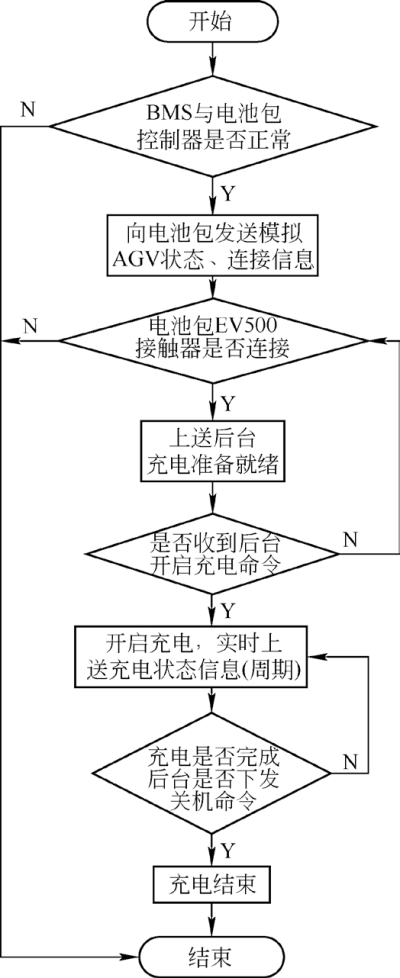
图4 架载充电机充电流程
充电开启条件:架载充电机需在开启充电前向电池包控制器模拟发送AGV 电池包连接器连接确认和AGV运行状态。
充电阶段:根据电池特性,架载充电机充电模式分为CC(恒流)和CV(恒压)两种状态。在启动初期,充电机按照CC 模式对电池进行持续的大电流充电,当max cell voltage=4.1 V 或total voltage=738 V 时切换至CV 模式对电池进行持续涓流充电。
3 换电机器人系统
3.1 换电机器人
AGV 换电机器人是AGV 换电站系统的一部分,主要功能是将AGV 车载乏电电池与架载满电电池进行更换,以满足AGV 的续航功能。设备主要包含横移、升降和货叉伸出三个方向的运动功能,通过传感器实现电池在X、Y、Z 三个方向任意位置自由运动。换电机器人采用双立柱门式结构,横移运动采用“地轨+ 天轨”导向模式。具有整体结构简单、质量轻、可靠性高等特点。
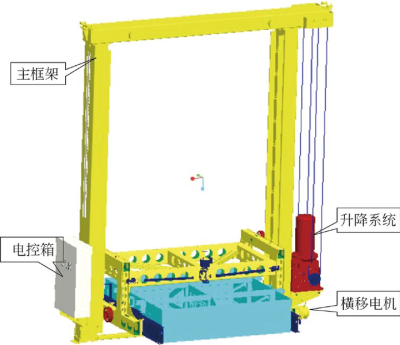
图5 换电机器人结构示意图
3.2 换电机器人系统控制特点
机器人控制系统由核心控制单元集中控制,在设备控制层采用Profibus 现场总线,与现场I/O、各个驱动单元、人机交互界面等进行通讯,在信息管理层采用以太网络与BES 系统、触摸屏进行通讯。本项目对机器人定位精度要求高且要求换电时间短。要求各个机构运动平稳、快速、定位准确。因此,从系统控制及驱动上采用了如下方式:
1)为了保证平稳及高速度,采用S 形曲线控制方式对比结果表明,S 形速度控制曲线较梯形曲线能够带来更小的负载速度超调与调整时间,即在相同的速度超调要求下,S 形速度控制曲线下能够进一步缩短加减速时间,提高负载速度的控制带宽。见图6 和图7。

图6 运动控制的梯形曲线与S 型曲线控制模式
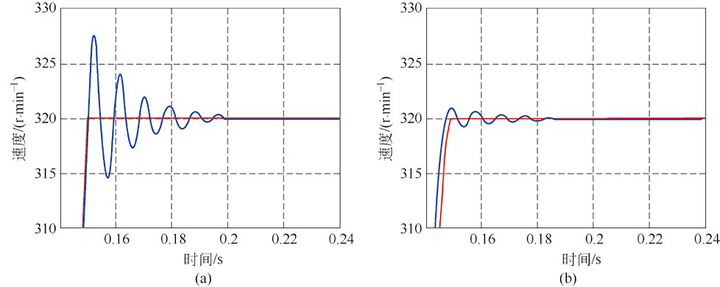
图7 仿真模型下梯形曲线与S 型曲线控制稳定性比较
2)为了保证高速度及大负载,采用了SVPWM 驱动方式根据Fortescue 提出的对称分量法,将定子坐标系、转子坐标系分别与驱动电流及执行电流进行对应。 本项目采用Clarke 变换和Park 变换,分析驱动与执行电流,通过控制系统进行协调,提高有功功率比例,减少无功功率消耗。见图8。
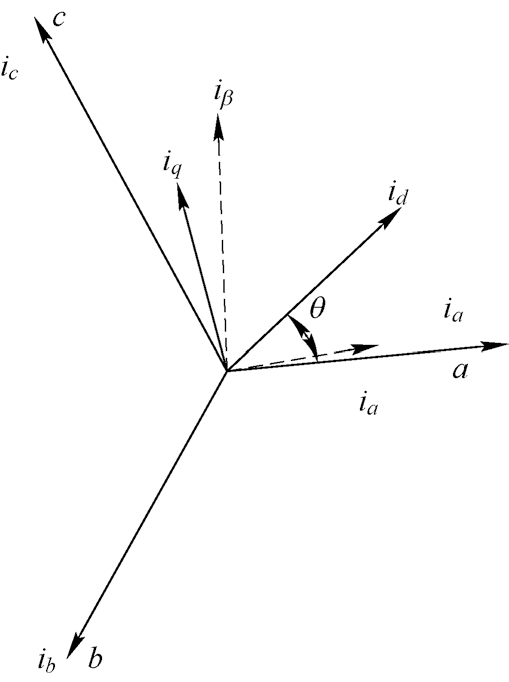
图8 SVPWM 过程中的坐标变换
基于3 轴、2 维的定子静止坐标系的各物理量变换到2 轴的定子静止坐标系中,该过程称为 Clarke 变换。实现a、b、c 笛卡尔坐标系到α、β 的2 轴极坐标系的转换,从而得到基于α、β 的 2 轴极坐标系的定子电流矢量。通过Park 变换,将其变换至随转子磁通同步旋转的 2轴系统中,也就是d、q 坐标系。
3)为保证控制系统的实时高效,采用模糊自整定
方式计算id、iqCCC(Crossing Coupling Controller)模糊自整定通过识别轨迹跟踪误差e 和误差变化率de 的大小,利用模糊规则进行模糊推理,然后根据推理结果对DKp、DKi、DKd 进行调整。定义e 、de 、DKp、DKi、DKd的模糊子集为[NB,NM,NS,ZO,PS,PM,PB],其为对称三角形隶属度函数。见图9 和图10。
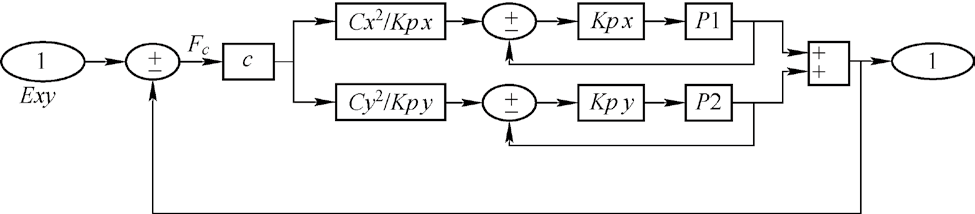
图9 轴控制时的CCC 控制结构
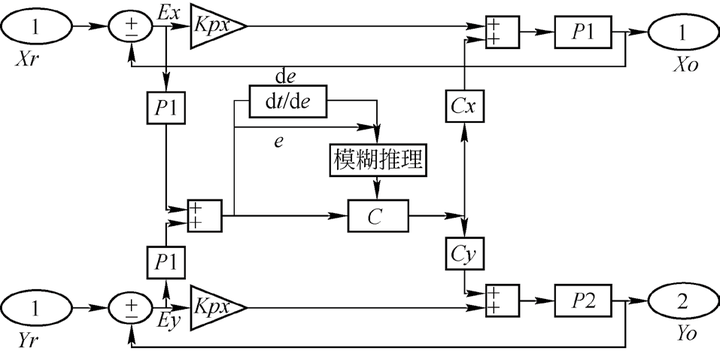
图10 CCC 模糊自整定PID 控制
Kp =Kp′+ qp *DKp
Ki =Ki′+ qi *DKi
Kd =Kd′+ qd *KDd
其中PID 控制器的初值Kp′、Ki′、Kd′ 可根据X 或Y 的模型由Z-N 方法进行设定,然后根据实验结
果Eo 对qp、qi、qd 进行调整。
4)为保证电池定位设备准确使用了各类高精度传感器设备的定位系统包括DMP定位单元、条码定位单元、绝对编码器定位单元、激光测距定位单元等。所有这些定位传感器向PLC 输出一个位置数据(包含数字量和模拟量),PLC 可以通过采集的这些数据获得当前位置,形成进一步的指令。通过以上这些精密设备的控制与保护,能够保证整个换电机器人在半自动、全自动模式下安全、可靠的运行。机器人半自动定位流程见图11。为了保证项目上所有AGV 电池包能够平均使用,在上位机发出自动换电指令时,BES 系统内部还会进行筛选,根据某些特定条件选出优先级最高的电池包进行使用。 1)电池包可用状态由于电池特性和充电策略的双重影响,当充电机从CC 模式转换至CV 模式后直至完全充电完成之前会有一个很长的持续CV 的涓流充电过程。为了提高电池包使用效率,避免出现电站内无包可用的情况发生,为此引入一个“电池包可用”这个概念。当电池包已经完成充电或者该电池正处于CV 状态下时,均定义为该电池包可用: 2) 电池包选取策略电池选取策略优先级为电池无故障>电池是否可用>使用次数较少>就近工位。 3) 换电站与卷闸门控制策略卷闸门的控制命令由上级VMS 系统发出,站级监控系统收到后检查命令的合法性,合法则下发给执行设备。站级监控系统回复VMS系统控制命令的执行结果,如果执行失败则需要回复失败原因。

图11 机器人半自动定位流程图
4 结论
以国内第一个AGV 全自动化换电码头项目为研究背景,介绍了AGV 自动充、换电设备及管理。AGV 全自动电池更换站是全换电AGV自动化码头的关键设备,而换电站内的充电和换电设备是电池更换站内的核心,两者相互适应、相辅相成,通过电池包充电和整体更换,使AGV 换电像加油一样快捷。依据ZP15-2305E 洋山AGV 自动化项目,阐述了AGV 自动充换电站在自动化码头上的应用。
上一篇:四层大气新中式自建别墅
下一篇:天池笔记tast4